








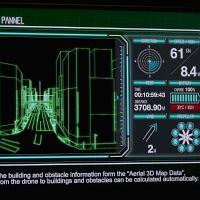
無人航空機が自律的に危険回避する飛行試験を三河湾で実施
農業や物流などさまざまな分野でドローンと呼ばれる小型の無人航空機や、それよりもひと回り大きく、より大きなセンサーなどを搭載できる中型の無人航空機の普及が進む中、より幅広い環境で安全な航行を実現するには、これらの無人航空機が地上から支援を受けられない状況でも、緊急事態に対応できる技術が必要です。
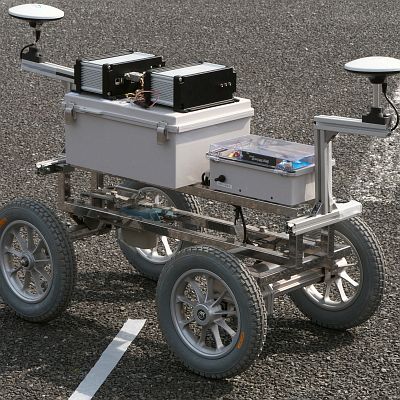
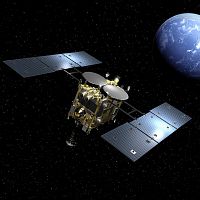
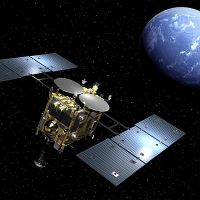
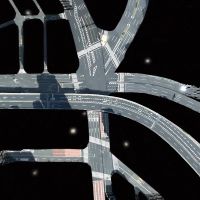
国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)、株式会社SUBARU、日本無線株式会社、日本アビオニクス株式会社、三菱電機株式会社、株式会社自律制御システム研究所の6者は昨年12月、こうした事態に対処するため、緊急時でも無人航空機が自律的に危険を回避できる技術を実証する飛行試験を、愛知県の豊川市御津と田原市白浜を結ぶ三河湾海上で行いました。

洋上で飛行実証試験を実施(提供:NEDO)
事前に設定された緊急着陸地点へ自律的に飛行
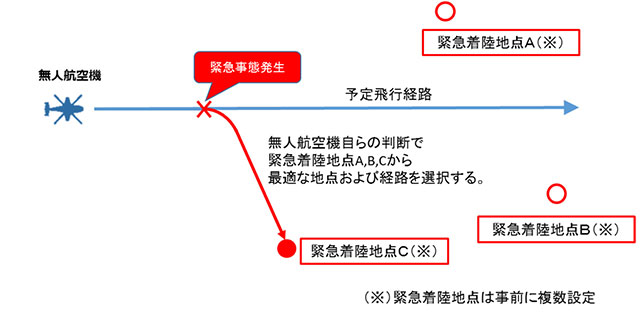
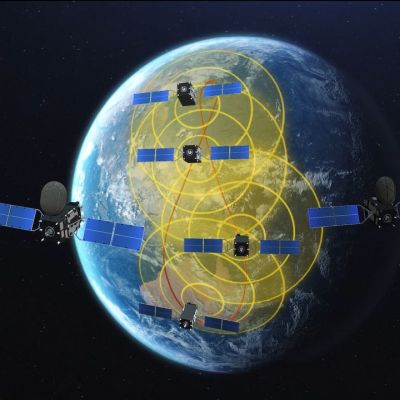
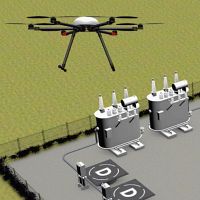
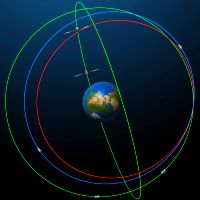
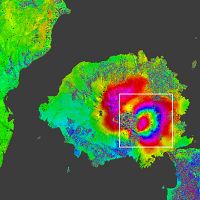
2019年12月16~24日に離島での無人航空機の運用を想定して実施された飛行試験では、飛行中に故障や燃料残量の減少、悪天候などの事態が発生した場合に、無人航空機が自らの判断で事前にプログラムされた飛行経路から経路変更して、事前に設定された緊急着陸地点まで飛行する機能の実証を行いました。
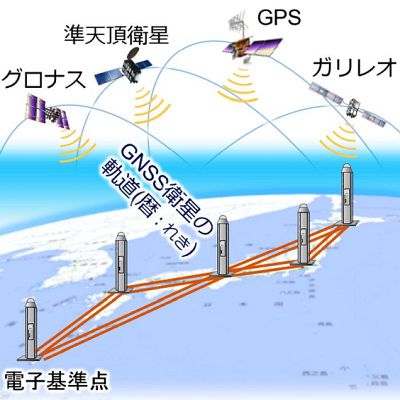
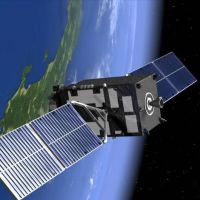
飛行試験に使用した中型の無人航空機には、みちびきのセンチメータ級測位補強サービスに対応したGNSS受信機を搭載し、故障模擬信号や燃料警告模擬信号、悪天候模擬情報に基づいて自律的に経路を変更し、高精度測位により受信したセンチメータ級の位置情報を用いて飛行できるかを検証しました。
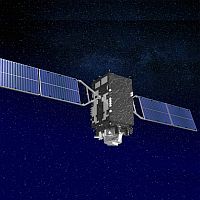
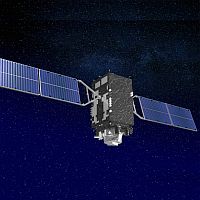
緊急時には自律的に経路を変更(提供:NEDO)
予定飛行経路に沿って、緊急着陸地点としてA、B、Cの3地点を事前に設定しました。実際に飛行試験を行い、緊急事態が発生した場合に無人航空機が自らの判断で、3点から最適な地点と経路を選択し、着陸地点まで飛行することが確認できました。
目視外飛行や第三者上空飛行に向けた取り組み
この飛行試験を行った背景には、操縦者が自分の目で無人航空機や航行の安全性を確認できない「目視外飛行」や、無人航空機の運航に関与しない第三者の上空を飛行する「第三者上空飛行」の実現に向けた取り組みがあります。
無人航空機に緊急事態が発生した場合、一般的には、まずドローン運航管理システムなどを使って、緊急着陸地点やそこまでの経路情報を地上から指示します。しかし、離島間の物流において長距離洋上飛行を行う場合などは、地上と無人航空機の通信インフラの整備が不十分で、緊急時の回避経路の指示を行えない状況も発生します。こうした時は、無人航空機がさまざまな緊急事態へ自律的に対応できる「自律的ダイナミック・リルーティング技術」が必要不可欠で、その実用化が求められています。
これは長距離の物流やインフラ点検には必須の技術ですが、実現には操縦者の目視に代わる安全措置の実施や、衝突回避技術の実装など、高い安全性や信頼性を確立する技術が必要となり、そのために欠かせないのがみちびきを利用した高精度の測位情報です。今回の実証は、そうした観点からの安全な無人航空機運用の実現を目指して実施されました。
参照サイト
関連情報
-
 2026年07月06日
2026年07月06日日本航海学会講演会でGPS/GNSS研究会・航空宇宙研究会を開催
-
 2026年06月15日
2026年06月15日日本測量協会が刊行する「応用測量論文集」について住田専務理事に聞く
-
 2026年05月12日
2026年05月12日日本大学の佐田教授がCLAS論文で応用測量論文奨励賞を受賞
-
 2025年12月26日
2025年12月26日プレイバック2025 ── 今年の「みちびき」を振り返る
-
 2025年12月03日
2025年12月03日時刻同期セミナー「GNSS TimeSync 2025」にみちびきが参加
-
 2025年11月06日
2025年11月06日[告知] 総務省東海総合通信局が12/3、名古屋でみちびき講演会を開催
-
 2025年07月04日
2025年07月04日府中市郷土の森博物館でみちびきに関する特別講演会を開催
-
 2025年03月31日
2025年03月31日国土地理院が4月1日に全国の標高成果を改定
-
 2025年02月12日
2025年02月12日宇宙開発戦略本部が宇宙基本計画工程表(令和6年度改訂)を決定
-
 2024年12月27日
2024年12月27日プレイバック2024 ── 今年の「みちびき」を振り返る
-
 2024年12月25日
2024年12月25日経産省とNEDOのビジネスコンテスト「NEDO Challenge」が1/23に最終選考会
-
 2024年12月16日
2024年12月16日港区立青山中学校が災危通報対応のデジタルサイネージを試験導入
-
 2024年06月24日
2024年06月24日「トランジスタ技術」2024年7月号に内閣府が寄稿
-
 2024年08月05日
2024年08月05日「トランジスタ技術」8月号でみちびき5~7号機を詳しく紹介
-
 2024年08月30日
2024年08月30日「トランジスタ技術」9月号でみちびき測位ペイロードを解説
-
 2024年09月27日
2024年09月27日「トランジスタ技術」10月号でみちびきの地上システムを紹介
-
 2024年10月11日
2024年10月11日「トランジスタ技術」11月号でみちびき測位のメカニズムを解説
-
 2024年05月13日
2024年05月13日レフィクシアがiPhoneと一体化して使用できるCLAS対応デバイスを発売
-
 2024年04月25日
2024年04月25日みちびきが日本航空宇宙学会「航空宇宙技術遺産」に認定
-
 2024年04月08日
2024年04月08日NEXCO東日本、CLASを活用したロータリ除雪車の自動化運用を開始
-
 2024年03月26日
2024年03月26日経産省とNEDOが衛星データを活用したソリューション開発をコンテスト形式で公募中
-
 2024年03月18日
2024年03月18日日本初! 国土地理院とJAXA、国際GNSS事業の解析センターに認定
-
 2024年03月04日
2024年03月04日みちびき初号機の開発から運用終了までを関係者に聞く(前編)
-
 2024年03月11日
2024年03月11日みちびき初号機の開発から運用終了までを関係者に聞く(後編)
-
 2024年02月28日
2024年02月28日衛星による防災シンポジウムでCLAS活用した取り組みを発表
-
 2024年02月14日
2024年02月14日岩国市で災危通報を利用してFM中継局から緊急放送する実証を実施
-
 2024年02月08日
2024年02月08日宇宙開発戦略本部が宇宙基本計画工程表(令和5年度改訂)を決定
-
 2023年12月28日
2023年12月28日プレイバック2023 ── 今年の「みちびき」を振り返る
-
 2023年12月04日
2023年12月04日測位航法学会がGPS/GNSSシンポジウム2023を開催
-
 2023年10月20日
2023年10月20日JAXAが小型技術刷新衛星研究開発プログラムにおけるオンボードPPP技術に関するRFIを開始
-
 2023年09月19日
2023年09月19日GNSSの精密な軌道情報の算出体制を構築した国土地理院とJAXAに聞く
-
 2023年09月06日
2023年09月06日コアがCLAS活用したインフラ点検「ChronoSky Eyes」を提供開始
-
 2023年08月25日
2023年08月25日GNSS信号の捕捉、追尾にチャレンジするコンテストを9/30まで開催中
-
 2023年07月13日
2023年07月13日宇宙開発戦略本部が宇宙基本計画を改訂
-
 2023年07月05日
2023年07月05日日立造船、みちびきを利用した農機自動操舵システムを岩見沢市で実演
-
 2023年06月30日
2023年06月30日国内初! 国土地理院とJAXA、衛星測位分野の国際事業に共同参画
-
 2023年06月08日
2023年06月08日マゼランシステムズジャパンが高精度測位の防災活用で意見交換会
-
 2023年04月19日
2023年04月19日レフィクシアが傾斜補正機能付きCLAS対応受信機を発売
-
 2023年04月03日
2023年04月03日第3世代6機目のGPS衛星打ち上げ
-
 2023年03月30日
2023年03月30日日立造船、岩見沢市でみちびき利用の除雪車ガイダンスシステムを検証
-
 2023年02月06日
2023年02月06日エアロダインがドローンの風力発電所点検を想定した実証飛行
-
 2023年02月01日
2023年02月01日宇宙開発戦略本部が「宇宙基本計画工程表(令和4年度改訂)」を決定
-
 2023年01月10日
2023年01月10日コアがCLAS対応ドローンの目視外点検でウェビナー開催
-
 2022年12月28日
2022年12月28日プレイバック2022 ── 今年の「みちびき」を振り返る
-
 2022年12月26日
2022年12月26日ビズステーション矢口氏が語る、新発売のCLAS対応受信機
-
 2022年11月24日
2022年11月24日ジオセンスがCLAS対応のGNSS受信ボードを発売
-
 2022年11月21日
2022年11月21日東大と三菱電機が準天頂衛星シンポジウムを開催
-
 2022年11月11日
2022年11月11日コアがCLAS対応国産ドローン活用事例を紹介するウェビナー開催
-
 2022年11月02日
2022年11月02日ビズステーションがCLAS/MADOCA-PPP対応のGNSS受信機3モデルを発売
-
 2022年10月21日
2022年10月21日マゼランシステムズの受信機がファームウェア更新でMADOCA-PPPに対応
-
 2022年09月29日
2022年09月29日岡山県矢掛町で衛星安否確認サービス(Q-ANPI)端末の操作訓練を実施
-
 2022年06月20日
2022年06月20日コアがCLAS対応ドローンを活用したソリューションでウェビナー開催
-
 2022年06月13日
2022年06月13日GPS/GNSS研究会がみちびき「神戸主管制局」の見学会を実施
-
 2022年05月23日
2022年05月23日SeptentrioがCLASの検証結果や活用事例を紹介するセミナー開催
-
 2022年05月13日
2022年05月13日コア、CLAS対応受信機を活用したドローン向けソリューションを提供
-
 2022年04月18日
2022年04月18日マゼランシステムズジャパンが農業へのCLAS活用で意見交換会
-
 2022年04月11日
2022年04月11日コア、CLAS対応受信機の評価実験結果を報告するWebセミナーを開催
-
 2022年03月07日
2022年03月07日コアがCLAS対応のGNSS受信機「Cohac∞ Ten」を発売
-
 2022年01月31日
2022年01月31日SeptentrioがCLAS対応受信モジュールとOEMボードを発売
-
 2022年01月27日
2022年01月27日EUが測位衛星「Galileo」2機を打ち上げ
-
 2022年01月24日
2022年01月24日三菱電機、L6など4周波数帯に対応した世界最小のGNSS用アンテナを開発
-
 2022年01月17日
2022年01月17日宇宙開発戦略本部が「宇宙基本計画工程表(令和3年度改訂)」を決定
-
 2022年01月11日
2022年01月11日ACSLがSLAS対応の小型空撮ドローン「SOTEN(蒼天)」を発表
-
 2021年12月28日
2021年12月28日プレイバック2021 ── 今年の「みちびき」を振り返る
-
 2021年12月20日
2021年12月20日u-bloxの仲氏が語るCLAS対応「NEO-D9C」
-
 2021年12月13日
2021年12月13日八代市がQ-ANPI活用した災害時安否確認の実証実験を開始
-
 2021年11月22日
2021年11月22日アイレス電子工業がみちびき活用した避難誘導装置を開発
-
 2021年10月07日
2021年10月07日パナソニックが業界初の災危通報に対応したETC2.0車載器を発売
-
 2021年09月13日
2021年09月13日SLAS対応の安全運転支援サービス「Driving!」開発者に聞く
-
 2021年08月10日
2021年08月10日宇宙基本計画工程表改訂に向けた重点事項を決定
-
 2021年07月27日
2021年07月27日みちびきを活用し、東京オリンピックのセーリング競技運営を支援
-
 2021年07月21日
2021年07月21日宇宙ビジネス共創委員会の第2回シンポジウムを開催
-
 2021年07月19日
2021年07月19日日本航海学会春季研究会でみちびきの将来計画や性能評価報告
-
 2021年07月12日
2021年07月12日損保ジャパンが安全運転支援サービスにSLAS対応製品を採用
-
 2021年07月05日
2021年07月05日国土地理院、電子国土基本図の迅速更新にCLAS活用のメド
-
 2021年07月01日
2021年07月01日第3世代の5機目となるGPS衛星を打ち上げ
-
 2021年05月31日
2021年05月31日ドローン産業ビジョンシンポジウムでみちびきの実証事例を紹介
-
 2021年05月17日
2021年05月17日SLAS対応のHonda新型「レジェンド」が自動運転レベル3を実現
-
 2021年05月10日
2021年05月10日LBJ 2021で内閣府・杉村技術参与がみちびき利活用事例を紹介
-
 2021年04月26日
2021年04月26日MASA「ザ・ゴルフウォッチA1-II」がみちびきの災危通報に対応
-
 2021年04月15日
2021年04月15日名城大がみちびき受信データ含む自動運転技術開発用データセットを公開
-
 2021年04月05日
2021年04月05日海上技術安全研究所がみちびきCLAS活用の小型船自動着桟実験を公開
-
 2021年03月15日
2021年03月15日JAXAとNECが静止衛星のGPS航法に成功
-
 2021年02月06日
2021年02月06日日大・佐田教授が国土地理院報告会でみちびきの特別講演
-
 2021年02月01日
2021年02月01日みちびきを活用した「はやぶさ2」帰還カプセル回収の詳細を聞く
-
 2021年01月25日
2021年01月25日2020年に打ち上げられた各国の測位衛星
-
 2020年12月25日
2020年12月25日プレイバック2020 ── 今年の衛星測位を振り返る
-
 2020年12月21日
2020年12月21日和光市で、SLASを活用した見守り端末「Ropot」の実証実験
-
 2020年12月18日
2020年12月18日日本航空宇宙学会が、宇宙ビジネス創出のための「宇宙ビジネス共創委員会」設立
-
 2020年12月14日
2020年12月14日「はやぶさ2」帰還カプセル回収を支えた「みちびき」の貢献
-
 2020年12月09日
2020年12月09日[募集] S-Boosterオンラインアイデアソン
-
 2020年10月12日
2020年10月12日本田技術研究所がSLAS対応の見守りロボット端末を開発中
-
 2020年09月23日
2020年09月23日コアがみちびき活用したドローン測量のウェブセミナー開催
-
 2020年09月14日
2020年09月14日日本海事新聞がCLAS応用のボート自動着岸技術でセミナー開催
-
 2020年09月07日
2020年09月07日小峰無線電機がCLAS対応のマルチGNSSアンテナを発売
-
 2020年08月03日
2020年08月03日測位航法学会、2020年全国大会をオンラインで開催
-
 2020年07月16日
2020年07月16日米国、3機目のGPS第3世代衛星打ち上げに成功
-
 2020年07月13日
2020年07月13日宇宙開発戦略本部が5年ぶりに宇宙基本計画を改訂
-
 2020年05月25日
2020年05月25日新宿山吹高校で「みちびき」を題材とした授業を実施
-
 2020年04月13日
2020年04月13日NTTデータ、災危通報の防災情報を屋外スピーカーで自動発信
-
 2020年03月23日
2020年03月23日古野電気が災危通報に対応した受信機「QZ-DC1」を開発
-
 2020年03月02日
2020年03月02日日精とフェイバライツ、みちびき4周波対応のアンテナ開発へ
-
 2020年01月23日
2020年01月23日米国が第3世代GPS衛星の運用を開始
-
 2020年01月14日
2020年01月14日宇宙開発戦略本部が「宇宙基本計画工程表(令和元年度改訂)」を決定
-
 2020年01月09日
2020年01月09日みちびきの災危通報、JEITAが車載器の標準仕様を制定
-
 2020年01月06日
2020年01月06日セルスター工業、災危通報に対応した初のドライブレコーダーを発売
-
 2019年12月25日
2019年12月25日みちびき「Q-ANPI」端末を搭載した「特務機関NERV災害対策車両」が公開
-
 2019年12月19日
2019年12月19日みちびき活用の視覚障害者支援策が、S-Booster 2019で最優秀賞に
-
 2019年12月16日
2019年12月16日横浜のMWE 2019で高精度衛星測位の最新技術を紹介
-
 2019年12月09日
2019年12月09日イームズロボティクスが農機に後付けするみちびき対応自律走行ユニット開発へ
-
 2019年11月21日
2019年11月21日シスコと慶應SDM、宇宙アセットを利用した東京2020大会に向けた参加型サービス創出プログラムを開始
-
 2019年11月14日
2019年11月14日北アルプス“氷河”の学術調査にGNSS測量が貢献
-
 2019年11月11日
2019年11月11日CLAS対応GNSS受信機についてセプテントリオに聞く
-
 2019年10月21日
2019年10月21日「農業Week」でスマート農業に関するセミナーを開催
-
 2019年10月15日
2019年10月15日羽田空港で荷物コンテナ運搬車の位置を把握する実証実験
-
 2019年10月07日
2019年10月07日中部大学、妨害に強いGPS受信システムをJAXAらと共同研究
-
 2019年09月17日
2019年09月17日国土地理院で、「測地学サマースクール2019」開催
-
 2019年09月02日
2019年09月02日米国、2機目の第3世代GPS衛星マゼランを打ち上げ
-
 2019年08月22日
2019年08月22日みちびき活用した道路交通法遵守の可視化サービスを紹介
-
 2019年08月19日
2019年08月19日M・S・Kのライフジャケット、SLAS測位の位置情報で遭難救出を支援
-
 2019年08月05日
2019年08月05日経済産業省が「Tellus利用促進実証事業」を公募中
-
 2019年08月01日
2019年08月01日測位航法学会による「Summer School on GNSS 2019」始まる
-
 2019年07月08日
2019年07月08日国土地理院、GNSSによる標高決定に向けた「航空重力測量」を開始へ
-
 2019年06月24日
2019年06月24日鹿島建設、工事の完成イメージを現場に「投影」する技術を発表
-
 2019年06月18日
2019年06月18日総務省が「情報通信審議会からの一部答申」を公表
-
 2019年06月17日
2019年06月17日ユーブロックス社、2周波受信チップのセミナーを開催
-
 2019年05月30日
2019年05月30日[展示] WTP2019、東京ビッグサイトで5月31日まで開催
-
 2019年06月10日
2019年06月10日[講演] WTP2019で衛星測位に関するセミナーを実施
-
 2019年06月07日
2019年06月07日「課題解決に向けた先進的な衛星リモートセンシングデータ利用モデル実証プロジェクト」公募開始
-
 2019年06月03日
2019年06月03日測位航法学会、2019年全国大会を東京海洋大で開催
-
 2019年05月16日
2019年05月16日中国が4月20日、BeiDou衛星打ち上げに成功
-
 2019年05月07日
2019年05月07日みちびき活用の春山除雪実証、知床横断道が開通
-
 2019年04月08日
2019年04月08日中部大のGNSS小型受信機、軌道上でみちびき受信を確認
-
 2019年03月25日
2019年03月25日北海道開発局、知床峠でみちびきを活用した除雪実証実験
-
 2019年03月21日
2019年03月21日タイで開催した国連宇宙部GNSSセミナーに東京大などが協力
-
 2019年03月18日
2019年03月18日国土地理院本院で企画展「高さってなんだろう?」を開催
-
 2019年03月11日
2019年03月11日パーキンソン博士らGPS開発の功労者4氏が、エリザベス女王工学賞を受賞
-
 2019年03月04日
2019年03月04日海上保安庁、ディファレンシャルGPSの運用を終了
-
 2019年02月18日
2019年02月18日「みちびき×GPS!」特集が話題の『トランジスタ技術』編集部に聞く
-
 2019年02月12日
2019年02月12日米国が第3世代GPS衛星の打ち上げに成功
-
 2019年02月04日
2019年02月04日米国ベンチャーによる、はぐれた仲間と合流できる位置情報端末「LynQ」
-
 2019年01月28日
2019年01月28日アウトバーンの路面状況把握にドローンを活用(ドイツ)
-
 2019年01月21日
2019年01月21日海上保安庁、バーチャルAISで「推薦航路」を設定する世界初の取り組み
-
 2019年01月07日
2019年01月07日宇宙開発戦略本部で「宇宙基本計画工程表(平成30年改訂)」が決定
-
 2018年12月27日
2018年12月27日大手ゼネコン、現場での高精度測位活用を加速
-
 2018年12月25日
2018年12月25日国土地理院のミニドラマ映像、制作の背景とねらいを聞く
-
 2018年12月23日
2018年12月23日東京海洋大でGPS/GNSSシンポジウム2018を開催
-
 2018年12月21日
2018年12月21日[告知] 三菱みなとみらい技術館で人工衛星とロケットをテーマにした企画展を開催
-
 2018年12月17日
2018年12月17日大地震後のエベレスト再測量で、みちびき活用の可能性を探る
-
 2018年12月13日
2018年12月13日子ども向け百科に、みちびきが図解で紹介されています
-
 2018年12月06日
2018年12月06日国交省、陸海空の自動運転に関する技術フォーラムを開催
-
 2018年11月28日
2018年11月28日国土地理院が、地殻変動による位置情報の歪み補正の解説動画
-
 2018年11月17日
2018年11月17日[告知] チェコ大使館で11月28日、チェコ航空宇宙セミナーを開催
-
 2018年10月31日
2018年10月31日MASAのゴルフウォッチがみちびきのSLASに対応
-
 2018年10月24日
2018年10月24日CEATEC JAPAN 2018でみちびきに関する講演
-
 2018年10月07日
2018年10月07日中国が9月19日、2機のBeiDou衛星打ち上げに成功
-
 2018年09月21日
2018年09月21日東京海洋大で第6回GNSSサマースクール開催
-
 2018年09月03日
2018年09月03日SPACが衛星測位と地理空間情報フォーラムを開催
-
 2018年08月30日
2018年08月30日中国が今年10・11機目のBeiDou衛星打ち上げに成功
-
 2018年08月13日
2018年08月13日7月25日、測位衛星Galileoの4機同時打ち上げに成功
-
 2018年08月09日
2018年08月09日日立製作所と豊田通商、海外でのみちびき実証実験を報告
-
 2018年08月06日
2018年08月06日中国が7月29日、BeiDou衛星2機の同時打ち上げに成功
-
 2018年07月30日
2018年07月30日データ流通推進フォーラムで「G空間情報センター」に関する講演
-
 2018年07月23日
2018年07月23日中国が7月10日、第2世代のBeiDou衛星を打ち上げ
-
 2018年07月13日
2018年07月13日電子基準点を巨大地震の地震計に使う、国土地理院の「REGARD」
-
 2018年07月09日
2018年07月09日ロシアが測位衛星GLONASS-Mの打ち上げに成功
-
 2018年07月05日
2018年07月05日名古屋のITイベントでみちびきの利活用事例を紹介
-
 2018年06月28日
2018年06月28日LBJ2018でみちびきの最新動向を紹介する講演と展示
-
 2018年06月21日
2018年06月21日日本航海学会でみちびきに関する4つの講演
-
 2018年06月18日
2018年06月18日GESTISS、宇宙利用の可能性を探る入門セミナーを開催
-
 2018年06月11日
2018年06月11日横浜で「人とくるまのテクノロジー展2018」開催
-
 2018年06月04日
2018年06月04日WTP2018で内閣府・小暮参事官、東大・中須賀教授が講演
-
 2018年05月31日
2018年05月31日WTP2018で専門家による講演会と衛星測位の紹介展示
-
 2018年05月28日
2018年05月28日測位航法学会・全国大会を東京海洋大で開催
-
 2018年05月17日
2018年05月17日電子基準点で天気を予測する「GPS気象学」の可能性
-
 2018年05月07日
2018年05月07日千葉県、キョン防除対策にGPS首輪発信機を導入。生態解明を進める
-
 2018年05月02日
2018年05月02日衛星測位で海洋の発展をめざす「Sea Japan 2018」
-
 2018年04月24日
2018年04月24日インドがIRNSS-1I衛星の打ち上げに成功
-
 2018年04月13日
2018年04月13日中国が3月30日、2機のBeiDou衛星を同時打ち上げ
-
 2018年04月12日
2018年04月12日ユーブロックス社、多周波受信チップF9のセミナー開催
-
 2018年04月11日
2018年04月11日内閣府主催宇宙シンポジウムを開催
-
 2018年04月06日
2018年04月06日ジャパン・ドローン2018でGNSS関連のセミナー・展示
-
 2018年03月28日
2018年03月28日国土地理院、国会前庭に新たな電子基準点を設置
-
 2018年03月27日
2018年03月27日戸田建設が、衛星測位を活用したタワークレーンの2次元自動誘導システム
-
 2018年03月26日
2018年03月26日ドローン物流の実現に向け、福島県と業界団体が協力協定
-
 2018年03月23日
2018年03月23日佐賀県伊万里市で位置情報を提供するコミュニティバスを運行
-
 2018年03月22日
2018年03月22日フジタ、ドローン測量を切盛土工事の出来高管理に活用
-
 2018年03月19日
2018年03月19日日立製作所がIoTデータを可視化する交通データ利活用サービス
-
 2018年03月16日
2018年03月16日国土地理院、「位置の基準のあり方」について報告書をまとめる
-
 2018年03月15日
2018年03月15日九工大、運転者の異常検知し安全に停車するシステムにみちびき活用へ
-
 2018年03月13日
2018年03月13日国土地理院、ビッグデータで登山道を修正した地形図を初公開
-
 2018年03月12日
2018年03月12日みちびき対応の超小型GNSS受信機、宇宙空間での安定動作を確認
-
 2018年03月08日
2018年03月08日G-SPASE(社会課題解決型宇宙人材育成プログラム)2017年度最終報告会を開催
-
 2018年03月07日
2018年03月07日関西の交通事故リスク研究会がリスク軽減を考慮したアプリ提供
-
 2018年03月06日
2018年03月06日SBドライブと全日空が、羽田空港で自動運転バスの実証実験
-
 2018年03月01日
2018年03月01日ライトハウスTC、4つの周波数に対応したGNSSフロントエンドを4月に発売
-
 2018年02月28日
2018年02月28日日・タイG空間推進協力協議会が4月に設立へ
-
 2018年02月26日
2018年02月26日[告知] チェコ共和国大使館、3月1日に宇宙セミナーを開催
-
 2018年02月26日
2018年02月26日Cloud Days東京2018でみちびき利活用セミナーを実施
-
 2018年02月22日
2018年02月22日真冬の絶景「ジュエリーアイス」をGPSで追跡、北見工大が研究スタート
-
 2018年02月20日
2018年02月20日国土地理院でGNSS技術に関する研究セミナー開催
-
 2018年02月16日
2018年02月16日熊谷組など3社、GNSSを活用したクローラキャリアの自動走行技術を開発
-
 2018年02月14日
2018年02月14日中国、BeiDou衛星の2機同時打ち上げに成功
-
 2018年02月06日
2018年02月06日豊田通商が3月にバンコクでみちびきを活用したルートガイダンスの実証実験
-
 2018年02月01日
2018年02月01日東京エレクトロンデバイスが位置情報システムを構築するIoTキットを発売
-
 2018年01月26日
2018年01月26日オートモーティブワールドで、みちびき対応製品や関連技術の展示
-
 2018年01月25日
2018年01月25日国土地理院がビッグデータを活用した地形図の修正を開始
-
 2018年01月24日
2018年01月24日寒河江市が、除雪作業車両の追跡MAPをウェブ公開
-
 2018年01月23日
2018年01月23日超小型衛星「WNISAT-1R」がGNSS反射波のデータ取得に成功
-
 2018年01月19日
2018年01月19日国土地理院、みちびき3・4号機の観測データ提供を開始
-
 2018年01月15日
2018年01月15日JAXAの青少年向け冊子『宇宙のとびら』で、みちびき特集
-
 2018年01月12日
2018年01月12日BeiDou衛星、昨年11月に続き2機同時打ち上げに成功
-
 2017年12月26日
2017年12月26日宇宙開発戦略本部で「宇宙基本計画工程表(平成29年改訂)」が決定
-
 2017年12月25日
2017年12月25日横浜で行われたMWE2017で、みちびき関連のワークショップ
-
 2017年12月21日
2017年12月21日鉄道技術展2017で、みちびき対応製品など衛星測位の関連技術
-
 2017年12月20日
2017年12月20日国交省、岡山県でみちびきを活用したバスロケシステムの実証実験
-
 2017年12月15日
2017年12月15日SPACが第15回衛星測位と地理空間情報フォーラムを開催
-
 2017年12月14日
2017年12月14日欧州の測位衛星ガリレオ、2度目の4機同時打ち上げに成功
-
 2017年12月13日
2017年12月13日広島工大がみちびきの高精度測位を活用した機械除雪支援システムを開発
-
 2017年12月12日
2017年12月12日スマート農業をテーマに「農業機械化フォーラム」を開催
-
 2017年12月07日
2017年12月07日みちびき対応のセンチメータ級高精度測位端末AQLOC、4月1日発売へ
-
 2017年11月28日
2017年11月28日東京海洋大で第22回GPS/GNSSシンポジウムを開催 [前編]
-
 2017年11月29日
2017年11月29日東京海洋大で第22回GPS/GNSSシンポジウムを開催 [後編]
-
 2017年11月22日
2017年11月22日宇宙科学技術連合講演会で、みちびき関連セッション
-
 2017年11月14日
2017年11月14日中国が2機のBeiDou衛星を同時打ち上げ
-
 2017年11月08日
2017年11月08日自動運転技術搭載車「xAUTO」、みちびき信号用いた走行実証でも実用可能
-
 2017年11月07日
2017年11月07日NEXCO東日本、みちびきを活用した除雪車運転支援システムを試行導入
-
 2017年11月06日
2017年11月06日国交省、プローブ情報を活用した「通れたマップ」作成の実証実験を開始
-
 2017年11月02日
2017年11月02日G-SPASE、2017年度中間成果報告会を開催
-
 2017年11月01日
2017年11月01日リアルタイム測位利用技術講習会でみちびきの最新動向を紹介
-
 2017年10月27日
2017年10月27日総務省、異業種間の連携を深める「みちびき」フォーラムを開催
-
 2017年10月08日
2017年10月08日CEATEC JAPAN 2017で衛星測位の展示
-
 2017年10月04日
2017年10月04日ロシアの測位衛星GLONASS-M、9月22日に打ち上げ成功
-
 2017年10月03日
2017年10月03日企業内技術士交流会が、みちびきをテーマに講演会
-
 2017年09月29日
2017年09月29日センチメータ級測位補強サービスを用いた自動運転の実験、9月19日から開始
-
 2017年09月17日
2017年09月17日日立造船ら5社が「グローバル測位サービス株式会社」設立
-
 2017年09月13日
2017年09月13日国土地理院、巨大太陽フレアの影響を速報
-
 2017年09月11日
2017年09月11日インドがPSLVロケットによるIRNSS-1H衛星の打ち上げに失敗
-
 2017年09月09日
2017年09月09日ジャストシステムが「位置情報アプリに関する利用実態調査」
-
 2017年09月07日
2017年09月07日10月10日の4号機打ち上げに合わせて「種子島宇宙教室2017」開催(告知)
-
 2017年09月06日
2017年09月06日会津若松市で「OpenStreetMap」の国際カンファレンスを開催
-
 2017年09月04日
2017年09月04日ダム建設にGNSS技術で貢献、大成建設の「T-iBlast DAM」
-
 2017年08月26日
2017年08月26日Boschやu-bloxなど4社が高精度GNSS測位サービスの合弁会社設立
-
 2017年08月25日
2017年08月25日日本測量協会が、測量・地理空間情報イノベーション大会を開催
-
 2017年08月23日
2017年08月23日エプソンが2017年9月、みちびき対応のアナログウオッチを発売
-
 2017年08月14日
2017年08月14日GPS反射波で台風観測する小型衛星「CYGNSS」の現況
-
 2017年08月07日
2017年08月07日ブリ稚魚の生態に迫る、長崎大の「流れ藻GPS観測システム」
-
 2017年08月02日
2017年08月02日SBドライブ、自動運転シャトルバスの実証実験に車両を提供
-
 2017年07月30日
2017年07月30日「海のGEONET」研究チームが足摺岬沖で海底局3基を設置 [前編]
-
 2017年07月31日
2017年07月31日「海のGEONET」研究チームが足摺岬沖で海底局3基を設置 [後編]
-
 2017年07月21日
2017年07月21日東京ビッグサイトで「メンテナンス・レジリエンスTOKYO 2017」開催
-
 2017年07月20日
2017年07月20日シャープ、GPSによる屋外自律走行監視ロボットを米国で発売
-
 2017年07月19日
2017年07月19日コア、みちびきのセンチメータ級測位を実現する受信機開発に着手
-
 2017年07月17日
2017年07月17日東大・海津准教授に聞く「GNSSで実現する小さく賢い農業機械」
-
 2017年07月14日
2017年07月14日日の丸交通とZMP、自動走行タクシーの実現に向けて協業
-
 2017年07月13日
2017年07月13日静岡県と山梨県が、富士登山の「混雑予想」を今年から提供
-
 2017年07月11日
2017年07月11日避難訓練アプリによる水害危険度可視化システム
-
 2017年07月10日
2017年07月10日「宇宙基本計画工程表」の策定に向けた意見募集について
-
 2017年07月07日
2017年07月07日ソフトバンク、気球とドローンの無線中継システムの実証実験結果を公開
-
 2017年07月06日
2017年07月06日パイオニアとHEREが自動運転向け地図で基本契約を締結
-
 2017年07月04日
2017年07月04日ロケーションビジネスジャパンに出展された衛星測位の技術
-
 2017年07月03日
2017年07月03日G-SPASEが宇宙産業を担う「人材像と育成策」についてアンケート
-
 2017年06月27日
2017年06月27日タイ王国と電子基準点網構築の協力覚書を締結
-
 2017年06月26日
2017年06月26日auとNTTドコモ、盗難・紛失スマホの位置検索サービスを強化
-
 2017年06月23日
2017年06月23日DMP、自動走行システムに向け高精度三次元地図の整備着手
-
 2017年06月21日
2017年06月21日人とくるまのテクノロジー展2017、横浜で開催
-
 2017年06月20日
2017年06月20日東京ビッグサイトで「ワイヤレス・テクノロジー・パーク2017」開催
-
 2017年06月12日
2017年06月12日静岡大がRTK-GNSS用基準局のリアルタイムデータを無償公開
-
 2017年06月09日
2017年06月09日日本航海学会が第136回春季講演会を開催
-
 2017年06月06日
2017年06月06日横浜のトライアスロンで、NTTがGPS追跡データの収集・配信実験
-
 2017年05月25日
2017年05月25日トプコン、千葉県の水田でIT農業の実証実験を開始
-
 2017年05月22日
2017年05月22日横浜国大・高橋名誉教授に聞く「スマホでみちびきを見る方法」
-
 2017年05月18日
2017年05月18日測位航法学会・全国大会を東京海洋大で開催
-
 2017年05月16日
2017年05月16日宇宙からの電波で地球と日本を測る、石岡測地観測局
-
 2017年05月06日
2017年05月06日ヤマト運輸とDeNAが、自動運転の荷物配送めざす「ロボネコヤマト」始動
-
 2017年05月02日
2017年05月02日日欧GNSSミッションを開催(1日目)
-
 2017年05月03日
2017年05月03日内閣府と欧州委員会が衛星測位活用の協力取り決めに署名
-
 2017年05月04日
2017年05月04日日欧GNSSミッションを開催(2日目)
-
 2017年04月28日
2017年04月28日ガーミンジャパンが「いいよねっと」を統合し、記者発表会を開催
-
 2017年04月27日
2017年04月27日地図や位置情報などのジオビジネス展示会「ジオ展2017」
-
 2017年04月17日
2017年04月17日東京港が、工事用船舶の新たな航行安全対策の運用を開始
-
 2017年04月15日
2017年04月15日OFF Line社、南相馬市でドローン見守りサービスのデモ実験に成功
-
 2017年04月12日
2017年04月12日「自動運転と衛星測位」を金沢大・菅沼准教授に聞く
-
 2017年04月05日
2017年04月05日測位衛星の位置を確認するアプリ「GNSS View」Ver.3.0をリリース
-
 2017年04月04日
2017年04月04日パナソニック、ETC2.0を利用できるGPS付き車載器を発売
-
 2017年04月02日
2017年04月02日慶應SDMとアシックス、高精度測位のスポーツ活用でセミナー開催 [前編]
-
 2017年04月03日
2017年04月03日慶應SDMとアシックス、高精度測位のスポーツ活用でセミナー開催 [後編]
-
 2017年04月01日
2017年04月01日ゼンリンと東電、安全飛行を可能にする「ドローンハイウェイ構想」で提携
-
 2017年03月31日
2017年03月31日JAXA、SIPの農業技術関連セミナーで高精度測位の時短技術を発表
-
 2017年03月23日
2017年03月23日近鉄バス、4月1日からバスロケーションサービスを開始
-
 2017年03月22日
2017年03月22日首都高速とDMPが連携し、高精度3次元データを相互活用
-
 2017年03月21日
2017年03月21日大成建設、ダム建設の発破作業でGNSS活用した新システムを開発
-
 2017年03月20日
2017年03月20日位置情報を活用したバイオロギングの研究を聞く
-
 2017年03月16日
2017年03月16日ライトハウスTC、全国主要道路のGNSS生観測データ収集を開始
-
 2017年03月14日
2017年03月14日ポケモンGOが自治体と協力して周遊マップを作成
-
 2017年03月09日
2017年03月09日テラドローン、写真測量を効率化するGPS内蔵の対空標識を発売
-
 2017年03月04日
2017年03月04日IoTエンジニアの注目を集めるGPS付SBC「ドラゴンボード410c」
-
 2017年03月02日
2017年03月02日G-SPASE(社会課題解決型宇宙人材育成プログラム)2016年度成果報告会を開催
-
 2017年02月26日
2017年02月26日GPS端末とドローンで、山間部の傷病者を早期発見する実証実験
-
 2017年02月17日
2017年02月17日パイオニアとHEREが、次世代位置情報サービス提供へ向け提携発表
-
 2017年02月14日
2017年02月14日新宿中央公園でドローンを活用した災害対応実証実験
-
 2017年02月13日
2017年02月13日ラズパイマガジン4月号はGPS測位モジュール基板が付録
-
 2017年02月12日
2017年02月12日オートモーティブワールドに出展された衛星測位の技術
-
 2017年02月03日
2017年02月03日ドコモ、位置情報を自動送信できる子ども向け携帯電話を発売
-
 2017年01月29日
2017年01月29日ソフトバンク「みまもりケータイ4」がGLONASS対応で3月発売へ
-
 2017年01月27日
2017年01月27日auが「ココセコム」対応の子ども向けスマートフォンを発売
-
 2017年01月20日
2017年01月20日日本無線、みちびきのセンチメータ級測位に対応したチップ開発に着手
-
 2017年01月18日
2017年01月18日アルテック、自律走行型セキュリティロボットの国内販売を開始
-
 2017年01月13日
2017年01月13日地理空間情報をワンストップで入手できるG空間情報センター
-
 2017年01月12日
2017年01月12日カシオ、オフライン使用可能なカラー地図搭載のみちびき対応ウォッチ発表
-
 2017年01月10日
2017年01月10日うるう秒で1秒長かった2017年の元日
-
 2017年01月06日
2017年01月06日農業食料工学会が農機の高精度測位でセミナー開催 [前編]
-
 2017年01月07日
2017年01月07日農業食料工学会が農機の高精度測位でセミナー開催 [後編]
-
 2017年01月04日
2017年01月04日[告知] 1月7日の政府広報ミニ番組でみちびきを紹介
-
 2017年01月03日
2017年01月03日日立造船、熊本でみちびき利用のUAVによる物資輸送実験
-
 2017年01月02日
2017年01月02日GPS反射波でハリケーンを観測する「CYGNSS」
-
 2016年12月30日
2016年12月30日ガリレオ、初期サービスを2016年12月15日から開始
-
 2016年12月29日
2016年12月29日チェコ共和国大使館でGNSSのワークショップ開催
-
 2016年12月27日
2016年12月27日船舶無人航行システムでのGNSS利用と日欧協力をさぐるセミナー
-
 2016年12月26日
2016年12月26日KDDIとナビタイム、走行実績から新規道路を抽出する「地図自動更新機能」を提供
-
 2016年12月25日
2016年12月25日ユーブロックスが高精度GNSSレシーバーのセミナーを開催
-
 2016年12月24日
2016年12月24日トヨタ自動車、通行実績マップを見られる無料ナビアプリの提供を開始
-
 2016年12月22日
2016年12月22日KDDI、プロドローン、ゼンリンの3社が専用基盤「スマートドローン」で業務提携
-
 2016年12月15日
2016年12月15日携帯やスマホのGPS機能で雪山遭難者の位置を特定する実証試験
-
 2016年12月12日
2016年12月12日三菱商事と日立がドローンのリモセンサービス開始
-
 2016年12月11日
2016年12月11日[告知] 奥州宇宙遊学館でみちびきをテーマにサイエンスカフェ
-
 2016年12月09日
2016年12月09日内閣府がSIP「自動走行システム」の大規模実証実験を来年から実施
-
 2016年12月08日
2016年12月08日みちびきプロモーション映像をウェブ公開 [告知]
-
 2016年12月07日
2016年12月07日丸文、スパイレント・コミュニケーションズ社と共同でGNSSセミナー開催
-
 2016年12月05日
2016年12月05日インクリメントP、タイで舗装劣化を把握する実証実験を開始
-
 2016年11月29日
2016年11月29日横浜市がゼンリンと連携し、Androidタブレットを使った下水道訓練
-
 2016年11月26日
2016年11月26日パイオニア、プローブカーが収集した通行実績データを提供開始
-
 2016年11月21日
2016年11月21日ソフトバンクの社内ベンチャーが自転車シェア事業の支援システム
-
 2016年11月20日
2016年11月20日欧州の測位衛星「Galileo」が初の4機同時打ち上げに成功
-
 2016年10月28日
2016年10月28日[告知] 国交省が横浜で位置情報活用サービスの創出イベント開催
-
 2016年11月18日
2016年11月18日国交省が位置情報活用サービスを考えるアイデアソン開催
-
 2016年12月01日
2016年12月01日国交省が位置情報活用サービスを考えるハッカソン開催
-
 2016年12月06日
2016年12月06日国交省、歩行者向けアプリ「ジャパンスマートナビ」を提供開始
-
 2017年02月19日
2017年02月19日国交省が横浜市で、位置情報アプリの実証イベント開催
-
 2016年11月17日
2016年11月17日「日本航空医療学会総会」でみちびきを紹介
-
 2016年11月16日
2016年11月16日ゼンリンデータコムと博報堂DYが共同でカーナビ向けサービス
-
 2016年11月15日
2016年11月15日安藤ハザマ、GNSS利用で法面整形を効率化するシステムを発表
-
 2016年11月13日
2016年11月13日NEXCO東日本が凍結防止剤最適自動散布システムの実用化に成功
-
 2016年11月10日
2016年11月10日マラソン大会でみちびき信号によるリアルタイムコーチングを実施 [告知]
-
 2016年11月09日
2016年11月09日国土地理院、「つくばVLBIアンテナ」の運用を年内で終了
-
 2016年11月08日
2016年11月08日マピオンが新たなウォーキングアプリ「aruku&」を提供開始
-
 2016年11月04日
2016年11月04日11月11日、「船舶の無人航行システム」に関するセミナーを都内で開催 [告知]
-
 2016年11月03日
2016年11月03日MOVIMASとフォルテ、高精度な車両の動態管理サービスを共同開発へ
-
 2016年10月31日
2016年10月31日NTTドコモが、携帯電話ネットワークでドローン活用めざすプロジェクト
-
 2016年08月25日
2016年08月25日[告知] 10年目のロボットカーコンテスト、10月23日に開催
-
 2016年10月29日
2016年10月29日GPS・QZSSロボットカーコンテスト2016が開催されました [結果レポート]
-
 2016年10月27日
2016年10月27日東京海洋大で第21回GPS/GNSSシンポジウム開催 [前編]
-
 2016年12月16日
2016年12月16日東京海洋大で第21回GPS/GNSSシンポジウム開催 [後編]
-
 2016年10月25日
2016年10月25日東芝、車載画像認識プロセッサを用いた自動運転システムの実証実験を開始
-
 2016年10月23日
2016年10月23日日建リース工業が追跡モジュール搭載パレットのレンタルサービス
-
 2016年10月19日
2016年10月19日岩手県花巻市が農作業ガイダンス用のGNSS基準局を設置
-
 2016年10月18日
2016年10月18日GPS受信機を活用した「聞き書きマップ」の取り組みが国交大臣賞を受賞
-
 2016年10月14日
2016年10月14日東京・有明で4年に一度の「国際航空宇宙展」開催中 [前編]
-
 2016年10月15日
2016年10月15日東京・有明で4年に一度の「国際航空宇宙展」開催中 [後編]
-
 2016年10月13日
2016年10月13日マゼランシステムズジャパンが、今年もCEATEC JAPANに出展
-
 2016年10月12日
2016年10月12日東京消防庁が「ドローンでGPS浮き輪を投下」の救助訓練を実施
-
 2016年10月08日
2016年10月08日大和市とクライシスマッパーズ・ジャパンが災害時ドローン活用で連携
-
 2016年10月07日
2016年10月07日「Galileo」4機の同時打ち上げに向け、ギアナで準備進む
-
 2016年10月06日
2016年10月06日三菱電機、ユーブロックス社とL6信号受信チップ開発で連携
-
 2016年10月01日
2016年10月01日NTTドコモが、新潟市で水田や保安林のドローン監視実証プロジェクト
-
 2016年09月24日
2016年09月24日「トラック隊列走行の実証事業」を豊田通商が受託
-
 2016年09月23日
2016年09月23日国土地理院の夏休み測量体験教室「GPSで地上絵を描こう!」
-
 2016年09月21日
2016年09月21日トヨタ・KDDI・コメダ珈琲店が「ながらスマホ運転」防止キャンペーン
-
 2016年09月17日
2016年09月17日大林組が、土砂崩れの兆候をつかむ「マルチGNSS地盤変位計測システム」
-
 2016年09月15日
2016年09月15日NTT Com、企業向け車両管理サービス「Vehicle Manager」の提供を開始
-
 2016年09月14日
2016年09月14日大分市、GPS搭載首輪でニホンザルの行動を調査
-
 2016年09月13日
2016年09月13日東芝とアルパイン、ドローンによる電力インフラの巡視・点検で提携
-
 2016年09月09日
2016年09月09日SEIKOがみちびき特別仕様のASTRONを発売
-
 2016年09月08日
2016年09月08日GPSに対応したApple Watch Series 2、9月16日に発売
-
 2016年09月01日
2016年09月01日世界初の自動運転タクシー試験営業がシンガポールでスタート
-
 2016年08月29日
2016年08月29日ウェザーニューズ、GPSの位置情報を利用した台風情報を配信
-
 2016年08月26日
2016年08月26日東大地震研らの研究グループ、「海のGEONET」をめざす研究開発を開始
-
 2016年09月19日
2016年09月19日GPS津波計の高機能化へ向けた東大地震研らの挑戦
-
 2016年08月23日
2016年08月23日OSMマッパーが集まりSotM Japan 2016を開催 [前編]
-
 2016年08月24日
2016年08月24日OSMマッパーが集まりSotM Japan 2016を開催 [後編]
-
 2016年08月19日
2016年08月19日東大の研究所が海鳥に付けたGPSで海上の風向・風速を推定
-
 2016年08月18日
2016年08月18日軌道修正した「Galileo」5・6号機が試験信号の配信を開始へ
-
 2016年08月15日
2016年08月15日夏休みに行こう! 地図と測量の科学館 [前編]
-
 2016年08月16日
2016年08月16日夏休みに行こう! 地図と測量の科学館 [後編]
-
 2016年08月12日
2016年08月12日宇宙基本計画工程表の改訂に向けパブリックコメント募集中
-
 2016年08月11日
2016年08月11日GPS探索ゲーム「パズドラレーダー」がPepperとコラボ
-
 2016年06月17日
2016年06月17日海洋大でGNSS技術を学ぶサマースクール、参加者募集中 [告知]
-
 2016年08月04日
2016年08月04日海外から多くの参加者。海洋大でGNSSサマースクール始まる [レポート1]
-
 2016年08月09日
2016年08月09日海洋大のGNSSサマースクール、全日程を無事終了 [レポート2]
-
 2016年08月05日
2016年08月05日測位衛星の配置が分かる「GNSS View」をVer.2.2にアップデート
-
 2016年08月01日
2016年08月01日山梨県警が7月から、スマホで位置情報を送信する救助通報システム
-
 2016年07月29日
2016年07月29日銀座でみちびきをモチーフにしたアート作品を展示
-
 2016年07月28日
2016年07月28日NEDO、みちびきを利用した歩行補助システムに実用化支援
-
 2016年07月27日
2016年07月27日ナレッジスイートが位置情報と連動したビジネス・チャットアプリ
-
 2016年07月26日
2016年07月26日[告知] イオンモール高知で、測位衛星に関する子ども学習講座を開催
-
 2016年07月23日
2016年07月23日SPACが「第14回衛星測位と地理空間情報フォーラム」を開催
-
 2016年07月22日
2016年07月22日タイプエスとヴァイサラが上空気象観測用ドローン「R-SWM」を共同開発
-
 2016年07月21日
2016年07月21日NISCが「ポケモントレーナーのみんなへおねがい♪」を公開
-
 2016年07月19日
2016年07月19日ユーブロックスが車載用の自律航法GNSSレシーバーの説明会開催
-
 2016年07月15日
2016年07月15日DeNA、千葉と福岡で無人運転バスのプロジェクトに参画
-
 2016年07月11日
2016年07月11日ガーミンがみちびきに対応した活動量計の新モデルを8月発売
-
 2016年07月10日
2016年07月10日柳川市が佐賀県に、衛星測位を使った航法の早期実現求める要望書
-
 2016年07月07日
2016年07月07日情報通信審議会が「実用準天頂衛星システムの技術的条件」を一部答申
-
 2016年07月06日
2016年07月06日ビジネスアイデアなどを競う「GNSS.asiaチャレンジ賞」、7月11日まで応募受付中
-
 2016年07月02日
2016年07月02日SPACが7月15日に「衛星測位と地理空間情報フォーラム」を開催 [告知]
-
 2016年07月01日
2016年07月01日「地理総合」の必修化と国土地理院の取り組み
-
 2016年06月30日
2016年06月30日未来館で空間情報技術に関するアイデアソン/ハッカソンを開催 [告知]
-
 2016年06月29日
2016年06月29日ユーテルサット、WAASペイロード搭載の通信衛星を打ち上げ
-
 2016年06月27日
2016年06月27日アイサンテクノロジー、愛知県幸田町で自動運転車の試乗会を開催
-
 2016年06月26日
2016年06月26日古野電気が新型のGNSS自動変位計測システムを開発
-
 2016年06月23日
2016年06月23日鹿島、UAVを使ったレーザー測量の実用化、国内初
-
 2016年06月23日
2016年06月23日MADOCA利用検討会の設立総会が開催
-
 2016年06月21日
2016年06月21日宇宙民生利用部会で「準天頂衛星システム利活用の促進」を議論
-
 2016年06月18日
2016年06月18日ロケーションビジネスジャパンに出展された衛星測位の技術
-
 2016年06月16日
2016年06月16日中国が今年3機目のBeiDou衛星を打ち上げ
-
 2016年06月11日
2016年06月11日クラリオン、みちびき対応の4カ国語カーナビを発表
-
 2016年06月10日
2016年06月10日経産省、ベトナムでの高精度測位サービス実証事業の公募を開始
-
 2016年06月08日
2016年06月08日GSA、オランダにガリレオ・リファレンスセンター設置へ
-
 2016年06月04日
2016年06月04日「測量の日」に国土地理院で功労者感謝状の贈呈式
-
 2016年06月03日
2016年06月03日いすゞと日野、自動運転による隊列走行技術の共同開発に合意
-
 2016年06月02日
2016年06月02日国交省が「自動運転基準化研究所」を設立
-
 2016年06月01日
2016年06月01日ロシアの測位衛星GLONASS、5月29日に打ち上げ
-
 2016年05月31日
2016年05月31日「人とくるまのテクノロジー展」に出展された衛星測位の技術
-
 2016年05月31日
2016年05月31日「人とくるまのテクノロジー展」で衛星測位の学術講演会
-
 2016年05月30日
2016年05月30日車両緊急通報システム「eCall」
-
 2016年05月28日
2016年05月28日欧州の測位衛星Galileo 13・14号機打ち上げ成功
-
 2016年05月27日
2016年05月27日ドローン飛行支援地図サービス「SoraPass」が提供開始
-
 2016年05月23日
2016年05月23日パイオニアがHEREと共同でデジタル地図更新の実証実験を開始
-
 2016年05月21日
2016年05月21日自動走行システム実現に向け、地図会社や自動車メーカー15社が新会社を設立
-
 2016年05月20日
2016年05月20日ナビタイムジャパンが訪日外国人の移動実績データを第三者を通じ提供
-
 2016年05月19日
2016年05月19日国土地理院が6月8日に一般向け報告会を開催 [告知]
-
 2016年06月14日
2016年06月14日国土地理院の年次報告会、テーマは「くらしを守る」 [結果レポート]
-
 2016年05月17日
2016年05月17日和歌山でみちびきを使った「Q-ANPI」実証実験を実施へ
-
 2016年05月12日
2016年05月12日総務省が「実用準天頂衛星システムの技術的条件」で委員会報告案
-
 2016年05月10日
2016年05月10日熊本地震で、国土地理院が5月3-5日に緊急GNSS観測を実施
-
 2016年05月09日
2016年05月09日日本の正確な位置を決定する、石岡測地観測局が本格運用を開始
-
 2016年05月07日
2016年05月07日早稲田大が、GNSSで姿勢を検出するUAV実験を開始
-
 2016年05月06日
2016年05月06日5月の測位衛星打ち上げ予定は「Galileo」2機と「GLONASS」
-
 2016年05月05日
2016年05月05日4月22-24日、世界各地でハッカソン「NASA Space Apps Challenge」を開催
-
 2016年05月04日
2016年05月04日DJI、プロ用空撮システム「Martice 600」を発表
-
 2016年05月03日
2016年05月03日アイサンテクノロジー、測量用UAV「Winser」を発表
-
 2016年05月02日
2016年05月02日IRNSS-1G打ち上げ成功し、インドの測位衛星システムが完成
-
 2016年04月30日
2016年04月30日インクリメントPがWindows10対応のMapDK5を提供開始
-
 2016年04月28日
2016年04月28日4月から小型無人機等飛行禁止法が施行
-
 2016年04月26日
2016年04月26日災害時の医薬品ドローン配送目指し、製薬・物流各社が連携
-
 2016年04月22日
2016年04月22日警察庁が「自動走行の公道実証実験」でガイドライン案
-
 2016年04月21日
2016年04月21日日立造船、熊本・天草地方をフィールドにドローン事業化を検討
-
 2016年04月19日
2016年04月19日熊本地震で、ITSJapanが乗用車・トラックの通行実績情報を提供
-
 2016年04月18日
2016年04月18日熊本地震で観測した電子基準点の変位を、国土地理院がいち早く公表
-
 2016年04月18日
2016年04月18日ガーミンがみちびき対応スマートウォッチの発表会を開催
-
 2016年04月13日
2016年04月13日地図情報の「HERE」にアマゾンとマイクロソフトが投資を検討
-
 2016年04月12日
2016年04月12日日本無線、二輪車用GNSS受信機付きETC2.0車載器を7月に発売
-
 2016年04月11日
2016年04月11日日本が提案した「地図情報に関する国際規格」が制定
-
 2016年04月10日
2016年04月10日パナソニック、みちびき対応の大画面カーナビを6月に発売
-
 2016年04月07日
2016年04月07日コマツ、ICT建機に「i-Construction」対応のソリューションサービスを提供
-
 2016年04月06日
2016年04月06日清水建設、地下埋設物を「見える化」するシステムを開発
-
 2016年04月05日
2016年04月05日東京大学でMADOCA利用検討会準備会合を開催
-
 2016年04月03日
2016年04月03日中国が3月30日、22機目のBeiDou衛星を打ち上げ
-
 2016年04月02日
2016年04月02日国土地理院「電子基準点データ提供サービス」のマルチGNSS対応を拡充
-
 2016年04月01日
2016年04月01日ヤンマー、みちびき対応の農業用トラクターを発売
-
 2016年03月31日
2016年03月31日国交省・経産省が自動走行ビジネスの「今後の取組方針」で報告書
-
 2016年03月30日
2016年03月30日国土地理院、災害時の空撮や測量でドローンを活用する「ランドバード」を発足
-
 2016年03月18日
2016年03月18日三菱重工G、シンガポールで測位衛星を利用した電子式道路課金システムを受注
-
 2016年03月16日
2016年03月16日国交省が3月11日、「高精度測位社会プロジェクト」の報告・検討会を開催
-
 2016年03月12日
2016年03月12日インドの測位衛星IRNSS-1F、3月10日に打ち上げ成功
-
 2016年03月11日
2016年03月11日ZMPとソニーモバイルの合弁会社、自社製UAVで計測ソリューション提供
-
 2016年03月10日
2016年03月10日イエローハット、みちびき対応ドラレコ「GARMIN GDR E350J」を発売
-
 2016年03月09日
2016年03月09日ライセンス取得でドローン保険が割安になる、損保ジャパン日本興亜の新商品
-
 2016年03月08日
2016年03月08日4月20~22日に幕張メッセで「国際ドローン展」
-
 2016年03月06日
2016年03月06日位置情報を利用したデータ放送も配信する新放送サービス「i-dio」
-
 2016年03月04日
2016年03月04日イプシロンが打ち上げる技術実証衛星に、宇宙用GNSS受信機を搭載
-
 2016年03月03日
2016年03月03日アシックスが、銀座でマラソンを疑似体験する実証実験デモ [結果レポート]
-
 2016年03月01日
2016年03月01日3月24~26日の「ジャパン・ドローン 2016」に出展します [告知1]
-
 2016年02月29日
2016年02月29日「社会課題解決型 宇宙人材育成プログラム」2015年度の成果報告会を開催
-
 2016年02月28日
2016年02月28日ZMP、RTK高精度位置計測システムの最新ソフトウェアをリリース
-
 2016年02月27日
2016年02月27日静岡大・浜松キャンパスにRTK高精度測位を実験するGNSS基準局設置
-
 2016年02月26日
2016年02月26日ASUSが光学3倍ズームのスマートフォン「ZenFone Zoom」を発表
-
 2016年02月25日
2016年02月25日[告知] アシックスがウェアラブル機器を使うスポーツ体験システムを公開
-
 2016年02月24日
2016年02月24日オリンパスがみちびき対応の防水デジカメ「TG-870 Tough」発表
-
 2016年02月23日
2016年02月23日エプソン、みちびき対応の「WristableGPS SF-850」を発売
-
 2016年02月22日
2016年02月22日東北大学のサイバー救助犬「レスキューロボドッグ」
-
 2016年02月21日
2016年02月21日ドローン専用地図サービスの実証実験がスタート
-
 2016年02月17日
2016年02月17日東京駅周辺の屋内外シームレス測位実験でトライアル版アプリ
-
 2016年02月14日
2016年02月14日ロシアの測位衛星GLONASS-M、2月7日に打ち上げ成功
-
 2016年02月12日
2016年02月12日GPS IIF-12衛星、2月5日に打ち上げ成功
-
 2016年02月11日
2016年02月11日中国が2月1日、21機目のBeiDou衛星を打ち上げ
-
 2016年02月10日
2016年02月10日構造計画研究所、「GNSS位置測位セミナー」を開催
-
 2016年02月08日
2016年02月08日東京駅周辺の魅力向上を目指すハッカソン、国交省が開催
-
 2016年02月06日
2016年02月06日キヤノン、プロ用一眼レフカメラの最高機種でみちびき対応
-
 2016年02月03日
2016年02月03日ソニー損保「トラブルナビ」がロードサービス呼び出し機能を強化
-
 2016年02月02日
2016年02月02日「高校・高専 気象観測機器コンテスト」で「傘の花畑」が優秀賞
-
 2016年01月30日
2016年01月30日日本無線、小型船舶向けアラートアプリの対応エリアを拡大
-
 2016年01月29日
2016年01月29日ユーブロックスが「u-blox M8」用ファームウェアを公開
-
 2016年01月28日
2016年01月28日ボッシュ、自動運転の公道走行試験を日本で開始
-
 2016年01月25日
2016年01月25日インドの測位衛星IRNSS-1Eが打ち上げに成功
-
 2016年01月24日
2016年01月24日パイオニア、3月にみちびき対応のドライブレコーダー発売
-
 2016年01月19日
2016年01月19日「はやぶさ2」のスイングバイを支えた衛星測位技術(前編)
-
 2016年01月21日
2016年01月21日「はやぶさ2」のスイングバイを支えた衛星測位技術(後編)
-
 2016年01月16日
2016年01月16日災害発生時に空撮で地図作成する「ドローンバード」プロジェクト
-
 2016年01月15日
2016年01月15日ブロードコム、車載用GNSSチップの新製品「BCM89774」を発表
-
 2016年01月13日
2016年01月13日[告知] 構造計画研究所が「GNSS位置測位セミナー」を開催
-
 2016年01月12日
2016年01月12日英字紙「The Japan Times」にみちびきの紹介記事
-
 2016年01月10日
2016年01月10日2015年に打ち上げられた15機の測位衛星
-
 2016年01月09日
2016年01月09日クリアパルス社がみちびき対応の環境放射線計測メーター
-
 2016年01月08日
2016年01月08日トヨタが高精度地図を安価に作成・維持するシステムを発表
-
 2016年01月06日
2016年01月06日各地でGPSを使って農作物の鳥獣被害を軽減
-
 2016年01月05日
2016年01月05日インテックの統合位置情報プラットホーム「i-LOP」がサービスイン
-
 2015年12月27日
2015年12月27日プレイバック2015(1)自動走行
-
 2015年12月28日
2015年12月28日プレイバック2015(2)ドローン
-
 2015年12月29日
2015年12月29日プレイバック2015(3)見守り・安全
-
 2015年12月30日
2015年12月30日プレイバック2015(4)防災
-
 2015年12月31日
2015年12月31日プレイバック2015(5)IoT
-
 2015年12月21日
2015年12月21日Galileo11・12号機、12月17日に打ち上げ成功
-
 2015年12月20日
2015年12月20日国交省が東京駅で高精度測位社会めざすアイデアソン開催
-
 2015年12月19日
2015年12月19日自動走行の実証実験を対象にした保険商品が登場
-
 2015年12月17日
2015年12月17日マゼランシステムズジャパンがユビキタスと資本業務提携
-
 2015年12月14日
2015年12月14日独自動車メーカー3社、ノキアのデジタル地図「HERE」買収を完了
-
 2015年12月12日
2015年12月12日パスコ、UAV測量の実証実験で大幅な効率アップを確認
-
 2015年12月10日
2015年12月10日UAVの飛行ルールを明確化する「改正航空法」が施行
-
 2015年12月03日
2015年12月03日総務省が12月17日、G空間情報とLアラート連携事業の成果報告会
-
 2015年12月02日
2015年12月02日国交省、東京駅周辺で屋内外シームレス測位の実証実験など実施
-
 2015年11月26日
2015年11月26日GAGANを構成するインドの衛星「GSAT-15」を打ち上げ
-
 2015年11月22日
2015年11月22日国土地理院が11月27日、G空間EXPO2015でシンポジウムを開催 [告知]
-
 2015年12月07日
2015年12月07日国土地理院が3Dマップの整備に向け、G空間EXPOでシンポ開催
-
 2015年11月21日
2015年11月21日東北大が日本海溝に沈み込む太平洋プレート速度の実測に成功
-
 2015年11月19日
2015年11月19日気象庁、新たに「噴火警報」も緊急速報メールで通知
-
 2015年11月18日
2015年11月18日アイサンテクノロジーが測量用UAVの実証実験 [前編]
-
 2015年11月24日
2015年11月24日アイサンテクノロジーが測量用UAVの実証実験 [後編]
-
 2015年11月16日
2015年11月16日矢野経済研究所が屋内位置情報システムの市場調査結果を発表
-
 2015年11月12日
2015年11月12日内閣府が宇宙基本計画 工程表への意見を11月17日まで募集中
-
 2015年11月11日
2015年11月11日JAXAが来年1月、測位精度向上に貢献する観測ロケット打ち上げ
-
 2015年11月10日
2015年11月10日11月27日、横浜のMWE2015で位置情報サービス技術のワークショップ
-
 2015年11月30日
2015年11月30日MWE2015の位置情報ワークショップで活発な議論
-
 2015年11月09日
2015年11月09日[告知] 11月15日、サイエンスアゴラで自動走行のセッション開催
-
 2015年11月04日
2015年11月04日仏ボルドーで開かれたITS世界会議で、衛星測位に注目が集まる
-
 2015年11月02日
2015年11月02日GPS IIF-11衛星をアトラスVロケットで打ち上げ
-
 2015年10月30日
2015年10月30日11月27日、G空間EXPO会場で「SPACシンポジウム2015」を開催
-
 2015年12月06日
2015年12月06日みちびき利活用への糸口を探るSPACシンポジウム2015
-
 2015年10月21日
2015年10月21日三菱電機、みちびき対応の自動運転コンセプトカーを発表
-
 2015年10月20日
2015年10月20日測位衛星の配置が分かる「GNSS View」のVer.2.0を公開
-
 2015年10月19日
2015年10月19日ガーミンがGPSサイクルコンピューターの新製品2機種を発売
-
 2015年10月17日
2015年10月17日構造計画研究所、高精度GNSSシミュレータ「SDR-SAT」を販売開始
-
 2015年10月15日
2015年10月15日Facebookで「近くにいる友達」が見つかるサービス開始
-
 2015年10月13日
2015年10月13日「シーテック ジャパン 2015」で多数のGNSS関連展示
-
 2015年10月12日
2015年10月12日アイサンテクノロジーとプロドローンが3次元地図計測用のUAV開発へ
-
 2015年10月07日
2015年10月07日富士山の環境保全に向け、GPS端末で登山者の動態調査
-
 2015年10月05日
2015年10月05日9月30日、中国が20機目のBeiDouを打ち上げ
-
 2015年10月04日
2015年10月04日9月25日の宇宙政策委員会で準天頂衛星システムに関する来年度概算要求
-
 2015年09月30日
2015年09月30日ガーミンがマルチスポーツ対応ウォッチ「fenix 3J」を10月7日に発売
-
 2015年09月22日
2015年09月22日パナソニックが今冬、タブレットPCで除雪支援する実証実験
-
 2015年09月16日
2015年09月16日「Galileo」衛星2機の打ち上げに成功
-
 2015年09月12日
2015年09月12日パイオニアとHEREが自動運転に向け、高度化地図活用の協業に合意
-
 2015年09月04日
2015年09月04日海保庁調査で、南海トラフ震源域海底が年間最大5.8cm移動
-
 2015年09月01日
2015年09月01日気象庁が桜島の噴火警戒レベルを3(入山規制)に引き下げ
-
 2015年08月28日
2015年08月28日阿蘇山の遭難救助にGPSを活用した現在地通報システム
-
 2015年08月27日
2015年08月27日コア、量産品で国産初のLEX信号対応受信機「LEXデコーダ」を発売
-
 2015年08月24日
2015年08月24日LINE、位置情報のリアルタイム共有サービス「LINE HERE」を公開
-
 2015年08月21日
2015年08月21日国交省が今年度最初の「高精度測位社会プロジェクト検討会」を開催
-
 2015年08月19日
2015年08月19日インクリメントPが金沢大学と共同で自動運転支援地図の開発に着手
-
 2015年08月18日
2015年08月18日ガーミンがみちびき対応ランニングウォッチ「ForeAthlete」の新製品
-
 2015年08月17日
2015年08月17日神奈川県がロボット実証支援で位置情報関連テーマを採択
-
 2015年08月14日
2015年08月14日米国は「GPS IIF-10」、中国は2機の「BeiDou」打ち上げに成功
-
 2015年08月13日
2015年08月13日神奈川県、ドローンで箱根山の大涌谷を2回目の調査
-
 2015年08月11日
2015年08月11日独ボッシュとカーナビのトムトムが自動運転のためのマップ作製で提携
-
 2015年08月07日
2015年08月07日ノキア、独自動車メーカー3社に地図事業「HERE」を売却へ
-
 2015年08月04日
2015年08月04日エプソンよりWristableGPSシリーズに登山用モデルが初登場
-
 2015年07月31日
2015年07月31日国土地理院、無人航空機(UAV)が撮影した口永良部島の画像を写真判読
-
 2015年07月30日
2015年07月30日米チップメーカーのクアルコム、再編計画で従業員の15%を削減へ
-
 2015年07月29日
2015年07月29日ドイツ自動車メーカー3社がノキア地図事業を買収と、欧米メディアが報道
-
 2015年07月28日
2015年07月28日矢野経済研究所が「自動運転システム世界市場に関する調査結果」を発表
-
 2015年07月24日
2015年07月24日コロラド州が7月17日を「GPSの日」に認定
-
 2015年07月24日
2015年07月24日セイコーウオッチ、みちびき対応のアストロン新モデルを9月に発売
-
 2015年07月22日
2015年07月22日静岡・山梨両県が富士山の登山者動向調査でGPS端末を配布
-
 2015年07月17日
2015年07月17日「衛星測位と地理空間情報フォーラム」で内閣府の小宮・宇宙戦略室長らが講演
-
 2015年07月16日
2015年07月16日外務省がGPSで危険情報を表示する「海外安全アプリ」を運用開始
-
 2015年07月10日
2015年07月10日つくば市の「地図と測量の科学館」が夏休みに測量体験教室を開催
-
 2015年07月08日
2015年07月08日伊豆箱根バスがGPS機能付「IP無線」を導入
-
 2015年07月03日
2015年07月03日三菱電機がモービルマッピングシステムの新技術を開発
-
 2015年07月02日
2015年07月02日2015年7月1日、3年ぶりに「うるう秒」を実施
-
 2015年06月29日
2015年06月29日「自動走行ビジネス検討会」が中間とりまとめ報告書を公表
-
 2015年06月24日
2015年06月24日国交省 近畿地方整備局が位置情報ビッグデータを活用した訪日外国人向け調査
-
 2015年06月23日
2015年06月23日SPACが7月17日、「衛星測位と地理空間情報フォーラム」を開催
-
 2015年06月18日
2015年06月18日NHKがサイエンスZERO「高精度測位社会がやってくる」をアンコール放送
-
 2015年06月18日
2015年06月18日コムテックがみちびき対応レーダー探知機の新製品を発売
-
 2015年06月17日
2015年06月17日国土地理院、口永良部島にGNSS火山変動リモート観測装置を設置
-
 2015年06月15日
2015年06月15日GNSS国際シンポジウム、今年は11月に京都で開催
-
 2015年06月12日
2015年06月12日国土地理院がマルチGNSS測量マニュアル案を制定
-
 2015年06月10日
2015年06月10日NECネクサソリューションズがみちびき対応のバス運行状況把握システム
-
 2015年06月09日
2015年06月09日構造計画研究所がGNSS位置測位セミナーを開催
-
 2015年06月08日
2015年06月08日JAXA・九州大学などがみちびき対応のドローンで農業利用を共同研究
-
 2015年06月05日
2015年06月05日ガーミンが、みちびき対応のハンディGPS「Oregon」シリーズで最新モデル発売
-
 2015年06月04日
2015年06月04日DeNAとZMP、自動運転技術の活用事業で合弁会社「ロボットタクシー」設立
-
 2015年06月03日
2015年06月03日ブルーバックス新書が、測位衛星を利用した最新の航空管制を紹介
-
 2015年06月01日
2015年06月01日デジスパイス、みちびき対応のスポーツドライビング解析システムで新バージョン
-
 2015年05月29日
2015年05月29日測量の日に合わせ、国土地理院が講演会やイベントを開催
-
 2015年05月28日
2015年05月28日構造計画研究所が6月5日に「GNSS位置測位セミナー」を開催
-
 2015年05月21日
2015年05月21日ガーミンがみちびき対応の腕時計型端末2機種を今月発売
-
 2015年05月18日
2015年05月18日グーグル、公道走行実験中の自動運転車による事故件数を公表。負傷者はゼロ
-
 2015年05月15日
2015年05月15日国土地理院、箱根山周辺のGNSS連続観測結果を公表
-
 2015年05月14日
2015年05月14日パナソニック、みちびき対応のカーナビ「ゴリラ」新機種を6月に発売
-
 2015年05月13日
2015年05月13日シチズンが位置情報も取得できるみちびき対応衛星電波時計を今秋発売
-
 2015年05月08日
2015年05月08日ASUS、みちびき対応のSIMフリーAndroidスマホ「ZenFone 2」を今月発売
-
 2015年05月07日
2015年05月07日総務省のガイドラインで、位置情報の個人情報保護に関する改正案
-
 2015年05月01日
2015年05月01日セイワ、みちびき対応のポータブルカーナビ「PIXYDA」新機種を発表
-
 2015年04月28日
2015年04月28日矢野経済研究所が、国内における「スマート農業」の市場規模調査
-
 2015年04月24日
2015年04月24日パナソニックがみちびき対応SDカーナビ、ストラーダの新機種を発売
-
 2015年04月21日
2015年04月21日みちびきの追跡管制を行う沖縄宇宙通信所が4月29日に施設を一般公開
-
 2015年04月20日
2015年04月20日タカコムがみちびき対応でコンパクト設計のタイムサーバを発表
-
 2015年04月20日
2015年04月20日コヴィアのみちびき対応、SIMフリー・スマホがニューモデルを発表
-
 2015年04月20日
2015年04月20日ニコンCOOLPIX、アウトドア用途の4機種がみちびきに対応
-
 2015年04月08日
2015年04月08日国連総会で「位置の基準を世界各国で連携して維持する」ことを決議
-
 2015年04月08日
2015年04月08日「SECURITY SHOW 2015」にシチズンTICがみちびき対応の小型タイムサーバーを出展
-
 2015年04月08日
2015年04月08日ガーミンがハンディGPS受信機の新モデル「GPSMAP64SJ」を発売
-
 2015年02月10日
2015年02月10日エプソンがみちびき対応のスポーツウォッチ「SF-110」を発表
-
 2015年01月27日
2015年01月27日古野電気、マルチGNSSによる受信チップ等の新商品を発表
-
 2015年01月27日
2015年01月27日京都市などが歩行者目線の3Dナビゲーションアプリを開発
-
 2015年01月13日
2015年01月13日JVCケンウッドがみちびき対応のAVナビシステム「MDV-D302」を発表
-
 2015年01月13日
2015年01月13日長野県などが冬山登山者の位置情報を把握する実証実験を実施
-
 2015年01月09日
2015年01月09日宇宙開発戦略本部が、新たな宇宙基本計画を決定
