








[実証2020-2] ビスペル、CLASを活用して建設機械を遠隔操作で自律化
内閣府及び準天頂衛星システムサービス株式会社は毎年、みちびきの利用が期待される新たなサービスや技術の実用化に向けた実証事業を国内外で実施する企業等を募集し、優秀な提案に実証事業の支援を行っています。
2020年度の実施事業を事業者ごとに紹介する2回目は、静岡県富士市で測量用ドローンや建設機械(建機)のリモート操作システムの開発を行っている合同会社ビスペルを取り上げます。同社はARAV株式会社と共同で、みちびきのセンチメータ級測位補強サービス(CLAS)を活用すると共に、安価な部品で建機をICT化し、自動運転による無人化を図る実証実験を行いました。
ビスペルの代表を務める馬渡純氏に話を聞きました。

ビスペルの馬渡氏
油圧ショベルとトラックにCLAS対応アンテナと受信機を設置
建設業界は少子高齢化により慢性的な人手不足が起きており、建設技能の継承も大きな課題となっています。国土交通省は建設生産プロセスでICTを活用する「i-Construction」を推進し、建設現場の生産性向上を目指していますが、従来の建機と比べて高価なICT建機は、まだ中小事業者へ広く普及するには至っていません。
こうした中でビスペルは、もともとダンプトラックやバックホウ(ショベルをオペレーター側の向きに取り付けた建機)の油圧ショベルの遠隔操作技術の開発に取り組んでおり、最初はラジコン模型を使って実験した技術を使って、実機による遠隔操作システムの開発に成功しました。
「次の段階として自律化を目指そうとしていた時に、ちょうどこの実証事業公募を知り、みちびきの高精度測位を活かして建機を自律化するシステムを開発しようと考えました」(馬渡氏)

油圧ショベルとダンプトラックにCLAS対応アンテナを設置
実証では、バケット容量が0.28立方メートルの小型の油圧ショベルとダンプトラックをレンタルし、独自のICT建機化するシステムを取り付けました。レンタル建機を使ったのは、ICT化されていない建機にも後付けで取り付け可能であることがニーズとして存在したからです。それを実現するには、システムの着脱が容易で、建機自体を改造せずに現状復帰できる必要がありました。
まず、みちびきのCLASに対応した受信アンテナを油圧ショベルとダンプトラックの運転席上部の屋根に2つずつ、計4つを設置した上で、それぞれのアンテナにCLAS対応の受信機を接続しました。三菱電機とマゼランシステムズの受信機を2つずつ、計4台を取り付けました。油圧ショベル側のみちびきの受信アンテナは、屋根の上の2カ所に対角に設置しました。アンテナ間の距離は1.7mで、対角に設置したのは機体の向きを認識するための措置です。
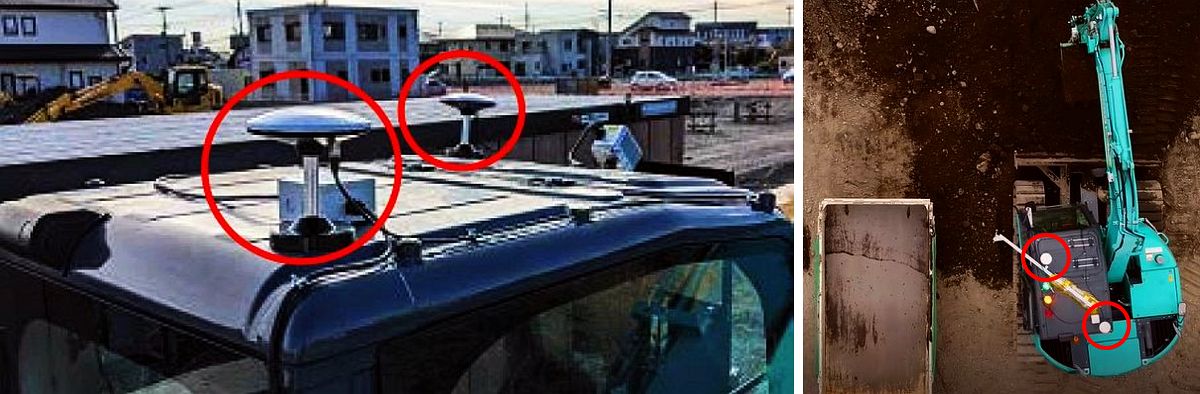
油圧ショベルにはアンテナを対角に設置
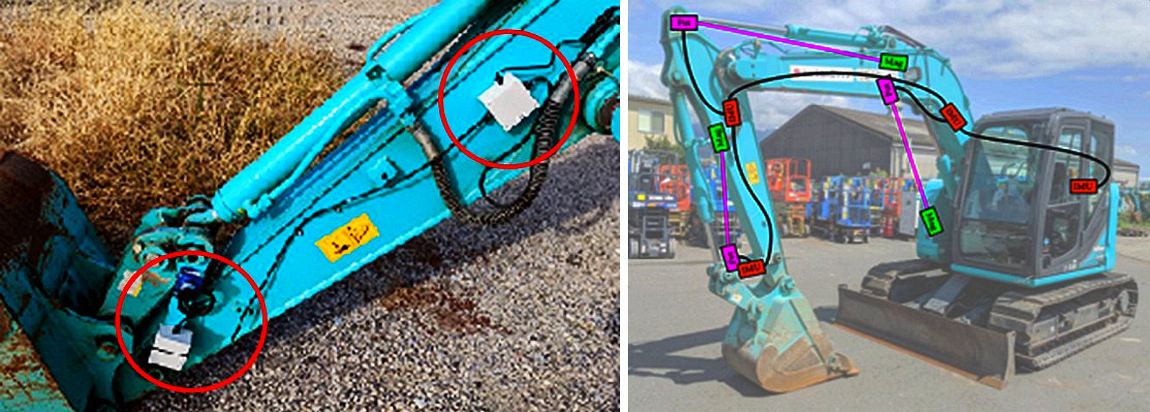
アームには加速度センサーと角度センサーを設置
油圧ショベルの屋根には、前方の土砂などの形状を認識するLiDAR(レーザースキャナー)を設置し、アームの各所に加速度センサーと角度センサーを取り付けました。ショベルの操作レバーには、自動操縦のためのアクチュエータ(駆動装置)も取り付けました。

土砂の形状を認識するためのLiDAR

操縦レバーにはアクチュエーターを設置
自律制御を行うソフトウェアの開発は、ARAVが担当しました。オープンソースのロボット開発プラットフォーム「ROS(Robot Operating System)2」を使用し、油圧ショベルに取り付けた加速度センサーと角度センサー、LiDARなど各種センサーが取得したデータとみちびきの測位結果をリアルタイムで読み取り、ROS2で統合させた上で、認識した土砂に対してバケットをどのように動作させるかを計画・実行するという手順で、自律的な掘削を実現します。
「苦労したのはAI(人工知能)技術を活用したモーションプランニングで、開発に使ったROS2はオープンソースとは言っても、油圧ショベルに適用させるため、ほとんどゼロから作る必要がありました。ソフトウェアの開発は、センサー類をすべて油圧ショベルに取り付けた状態にしないと始められず、短期間で開発して実験を行うのは大変でした」(馬渡氏)
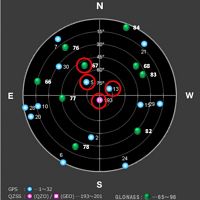
CLASだけでショベルの正確な方向を検知可能
実証実験は、東海道新幹線の新富士駅近くにある再開発現場で行いました。自律動作を行う油圧ショベルは、LTE回線でインターネットと接続してウェブブラウザから遠隔操縦できるようにした上で、動作を緊急停止させる安全スイッチも実装しました。
無人自動化された油圧ショベルを盛り土の手前に停車させた状態からスタートし、待機状態の油圧ショベルの横に、削った土砂を積み込むダンプトラックが並ぶと、自動的に土砂の掘削が始まります。アームを動かして土砂を掘削し、バケットの位置を調整しながらトラックへ土砂が次々と積み込まれました。

新富士駅近くで行われた実証実験
実験では、無人の状態で問題なく自律的に掘削して土砂をトラックへ積み込めることが確認できました。CLASの高精度測位で、機体の向き(ヨーイング)を認識し、掘削した位置を記憶することが可能なため、2回目は、1回目の掘削位置の横を正確に掘ることができました。掘削した土砂の量も、毎回ほぼ同量となりました。
「測量用ドローンですでにRTK測位(Realtime Kinematic、固定点の補正データを移動局に送信してリアルタイムで高精度に位置を測定する方法)の精度は把握していましたが、CLASでRTKと比べてほぼ遜色のない精度が実現できると確認できました。ショベルの方向検知はセンサーを使わずCLASのみで行いましたが、十分な精度が出ました」(馬渡氏)
ビスペルとARAVが進める建機のICT化システムは、RTK測位でも実現できますが、RTK方式や、そのネットワーク型のVRS方式(Virtual Reference Station、仮想基準点方式)の場合は、通信費やVRS配信業者への費用、ローカル固定局方式であれば固定局観測機の購入費用や事前の測量、固定局の電源確保や維持管理などの手間が必要となります。CLASを使えばこのような手間やコストが不要となります。
なお、実証実験の際、日によってオープンスカイであっても測位結果が上手くFIX(収束)しないことがあり、今後の課題となりました。
「屋根の上にポールを立て、アンテナを高い位置に設置する等の対策を検討しています。FIXさえすればCLASの精度には大変満足しているので、解決法を考えていきます」(馬渡氏)

無人で動く油圧ショベル
CLAS対応受信機の低価格化に期待
両社は今後、複数の建設現場で自動運転実証データを取得し、国交省へ情報提供していく方針です。導入コストを従来のICT建機と比べて半分にできるように工夫し、製品化を目指していますが、そのためには汎用性をどこまで追求するかが重要といいます。
「今回の実証では、油圧ショベルで盛り土の下側から土砂を削る処理を自律化しました。実際の工事では、盛り土の上にショベルが乗った状態で土砂を削るケースも多く、それには今回と異なるプログラミングが必要となります。また、実用化に向けては、奥行き方向のショベルの動きの細かいコントロールや、トラックの場所を自動的に検知して土砂を運ぶといった動作の実現が不可欠です」(馬渡氏)
最後に、今後のみちびき利用の可能性について話してもらいました。
「みちびきのCLASを使えば、田んぼの細い畦道にクローラー(移動式クレーン)やダンプトラックを自動的に進ませるといったことができます。建設や土木以外でも、たとえば観光の分野で、オンラインでドローンを遠隔操作してバーチャルツアーを行う場合に飛行禁止エリアを設定したり、途中まで自律飛行を行ったりもできます。対応受信機が安価になれば動き出すプレーヤーは多くなりますし、当社も今後、CLASを活用した遠隔リモート技術をいろいろな業界に展開していきたいと考えています」(馬渡氏)
(取材/文:片岡義明・フリーランスライター)
参照サイト
※内閣府及び準天頂衛星システムサービス株式会社は毎年、みちびきの利用が期待される新たなサービスや技術の実用化に向けた実証事業を国内外で実施する企業等を募集し、優秀な提案に実証事業の支援を行っています。詳細はこちらでご確認ください。
※ヘッダ及び本文中の画像・図版提供:合同会社ビスペル、ARAV株式会社
-
 2026年07月13日
2026年07月13日[実証2025-1] コア:木材トレーサビリティ効率化と伐採情報真正性の実証
-
 2025年10月27日
2025年10月27日[実証2024-5] JAMSTEC:みちびきを活用したドローン船による気象観測
-
 2025年09月29日
2025年09月29日[実証2024-4] 北海道ガス:CLASとLiDAR・SLAMのハイブリット運用による都市ガス供給エリアでのGNSS活用標準化
-
 2025年09月16日
2025年09月16日[実証2024-3] 日東製網:MADOCA-PPP対応みちびき海象ブイを活用した海外向け漁業支援システム
-
 2025年09月08日
2025年09月08日[実証2024-2] OST:信号認証サービスを用いた適正な漁業操業に対するエンドースメント及びMADOCA-PPPの測位精度検証と災危通報の利活用実証
-
 2025年08月06日
2025年08月06日[実証2024-1] ニュージャパンナレッジ:ごみ収集管理における「みちびき」活用実証
-
 2025年06月16日
2025年06月16日CLASを活用したハタケホットケの水田雑草対策ロボット「ミズニゴール」
-
 2025年04月14日
2025年04月14日ジビル調査設計がCLASを活用した橋梁点検支援ロボットを開発
-
 2025年01月27日
2025年01月27日[実証2023-10] 岩谷技研:測位補強サービスの高高度気球への適用
-
 2024年11月11日
2024年11月11日[実証2023-9] 松本コンサルタント:地籍調査にCLASを用いるための精度検証及びマニュアル作成
-
 2024年11月05日
2024年11月05日[実証2023-8] LocationMind:信号認証サービスを利用したCO2排出量モニタリング支援ソリューション
-
 2024年10月21日
2024年10月21日[実証2023-7] 山口放送:災危通報を活用した被災対応FMラジオ放送システムの実証
-
 2024年10月07日
2024年10月07日[実証2023-6] ファンリード:MADOCA搭載ドローンのインフラ点検への活用に向けた性能評価実証
-
 2024年09月19日
2024年09月19日[実証2023-5] 仙台高専:CLASにより自動走行するインフラ点検用地中レーダロボットの開発
-
 2024年08月27日
2024年08月27日[実証2023-4] 国際航業:MADOCA-PPPによる海洋離島のマッピングサービス実証事業
-
 2024年07月08日
2024年07月08日AITOYAがCLASを活用したクレーン衝突防止システムを開発
-
 2024年06月17日
2024年06月17日[実証2023-3] コア:信号認証サービスを用いた国産ドローンによるアンチGNSSスプーフィング実証
-
 2024年06月10日
2024年06月10日[実証2023-2] 北相木森水舎:社会実装に向けたみちびき利用による林業重労働作業「下刈り」の自動化
-
 2024年05月29日
2024年05月29日[実証2023-1] OST:みちびきを利用したAIによる漁業操業情報の自動作成
-
 2023年12月28日
2023年12月28日SLASを活用したエゾウィンの農作業支援システム「レポサク」
-
 2023年08月21日
2023年08月21日[実証2022-3] TOKYO MX:地上デジタル放送波を活用した避難者情報伝達手段の実証実験
-
 2023年07月26日
2023年07月26日[実証2022-2] 広島商船高専:みちびきを活用した自律航行船・ドローン間協調制御の物流網への適用
-
 2023年07月18日
2023年07月18日GNSSトラッカーでみちびき利活用を拡げるフォルテの戦略
-
 2023年06月20日
2023年06月20日[実証2022-1] エアロダイン:広域災害発生時における、みちびきを利用した洋上風力発電所の点検事業
-
 2023年05月08日
2023年05月08日北海道大学 野口教授に聞く、中山間地域スマート農業化の課題と将来像
-
 2023年03月16日
2023年03月16日各地で使われるボールドライトのSLASに対応した動態管理システム
-
 2023年03月06日
2023年03月06日西松建設に聞く、土木建設分野におけるCLASの有効性
-
 2023年02月13日
2023年02月13日全国初の自律航行水上EVタクシーにCLASが活用
-
 2023年01月30日
2023年01月30日PALTEKのSLAS対応「GPSトラッカーR」がドコマップと連携
-
 2022年12月22日
2022年12月22日北海道開発局がCLAS活用により運転手1人で操作可能なロータリ除雪車を配備
-
 2022年12月15日
2022年12月15日国交省が富山でCLAS活用した新型除雪トラックの試乗会を開催
-
 2022年11月28日
2022年11月28日[実証2021-6] Ashirase:CLAS、SLASを用いた視覚障がい者及び車いす利用者向け介助サービス事業
-
 2022年10月11日
2022年10月11日[実証2021-5] 先端ロボ財団:みちびきを利用した高精度な経路追従飛行・編隊飛行・着陸システムの開発
-
 2022年09月08日
2022年09月08日KISがSLASを活用した水道メーターの位置情報管理システムを開発
-
 2022年08月29日
2022年08月29日[実証2021-4] 福島高専:みちびきとMarhy 3D Mapのコラボレーションによる自動運転の基礎的実証事業
-
 2022年08月01日
2022年08月01日岩城農場 岩城善広氏:脱サラ就農後、みちびきを活用したスマート農業に挑戦
-
 2022年07月25日
2022年07月25日[実証2021-3] MSJ:みちびき対応cm級受信機とスレーブRTKによる姿勢角検出実証実験と制御系への適用
-
 2022年07月19日
2022年07月19日[実証2021-2] シーエーシー:みちびき×ブロックチェーンを用いた配達員保険システム
-
 2022年07月11日
2022年07月11日[実証2021-1] 東京海洋大:情報化施工に向けたGNSS基準点・精密測位に関するみちびき利用の基礎実証
-
 2022年02月28日
2022年02月28日SLASを活用した視覚障害者向け歩行ナビ「あしらせ」の実証実験
-
 2022年02月21日
2022年02月21日エアモビリティ、ナビシステム搭載のCLAS対応ドローンで実証実験
-
 2021年11月15日
2021年11月15日[実証2020-9] イームズロボティクスが熊本で物流用ドローンの実証実験
-
 2021年11月08日
2021年11月08日[実証2020-8] インフォマティクス、CLASとMR技術で建設現場へ3D導入
-
 2021年10月13日
2021年10月13日[実証2020-7] カワサキ機工がCLASを活用して農場内走行車両を自律化
-
 2021年09月21日
2021年09月21日[実証2020-6] 愛工大+竹中工務店によるコンクリート工事管理システム
-
 2021年09月06日
2021年09月06日[実証2020-5] MASAがゴルフウォッチを使った災危通報の実証実験
-
 2021年08月30日
2021年08月30日[実証2020-4] コア中四国カンパニー、みちびきを活用した石灰石の採掘支援
-
 2021年08月23日
2021年08月23日[実証2020-3] イクシスがSLAS/CLAS活用の道路付属物AI点検システム
-
 2021年08月02日
2021年08月02日[実証2020-1] 東光鉄工のCLAS対応ドローンによる肥料散布
-
 2021年06月28日
2021年06月28日ウインドサーフィン「鎌倉カップ」でSLASを活用した実証実験を実施
-
 2021年06月21日
2021年06月21日長岡市で、新ビジネス創出のアイデアソンと子育て世代向けマップ作り
-
 2021年05月24日
2021年05月24日日立ソリューションズが豪州でみちびき活用したスマホ土量計測
-
 2021年04月19日
2021年04月19日トヨタ自動車がみちびきを活用した駐車管理システムを試験運用
-
 2021年03月29日
2021年03月29日CLASとMADOCAの活用で海底地形図を自動作成するDeSETプロジェクト
-
 2021年03月22日
2021年03月22日国交省北陸地方整備局がCLASを活用して除雪トラックの実証実験
-
 2021年02月22日
2021年02月22日広島工大・菅教授が目指す、CLASを活用した機械除雪支援システム
-
 2021年02月15日
2021年02月15日東洋建設、人工魚礁の築造システムにみちびきを導入
-
 2021年02月08日
2021年02月08日NEXCO東日本、みちびきのCLASによるロータリ除雪車自動化を推進
-
 2021年01月18日
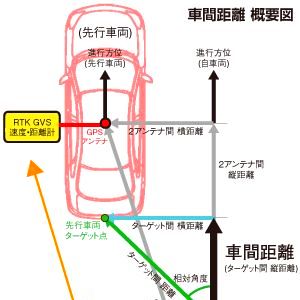
2021年01月18日バイオスシステムが開発した「CLAS車間距離計」
-
 2021年01月12日
2021年01月12日みちびきを活用した時刻同期がFMラジオの技術革新に貢献
-
 2020年11月24日
2020年11月24日「Shot Navi」を展開するテクタイトに聞くSLASの魅力
-
 2020年11月09日
2020年11月09日みちびきのSLAS/CLAS活用システムで、ヨット競技会を全面支援
-
 2020年10月19日
2020年10月19日イームズロボティクス、みちびきCLAS対応の農業散布ドローンを開発
-
 2020年10月05日
2020年10月05日CLAS活用の測量支援システムが、国交省のNETISに登録
-
 2020年07月20日
2020年07月20日福岡のキャニコムがCLASを活用した自動運転草刈り機を開発中
-
 2020年07月06日
2020年07月06日四門、みちびきのCLASを活用した深浅測量の実証実験を実施
-
 2020年06月29日
2020年06月29日国際航業、インドネシアでみちびきを活用した高精度測量の実証実験
-
 2020年06月22日
2020年06月22日みちびきを活用し、自動運転バスの乗客に避難情報を提供
-
 2020年06月15日
2020年06月15日ファンリード、マレーシアでみちびき活用のドローン観測システムを実験
-
 2020年06月08日
2020年06月08日エクスプローラ、みちびきのSLASを活用した無線ICタグで物流管理
-
 2020年06月01日
2020年06月01日タイでみちびきを使ったマイクロEVの自動運転実証実験
-
 2020年05月18日
2020年05月18日ニュージャパンマリン九州、小型ボートの自動着岸をみちびきのCLASで実現
-
 2020年04月27日
2020年04月27日豊橋鬼祭に、みちびきのSLASを活用したアプリ「おにどこ」登場
-
 2020年04月06日
2020年04月06日山口県でみちびきを使って視覚障害者のランニングを支援する実証実験
-
 2020年03月30日
2020年03月30日みちびきの高精度測位を活用した農地管理アプリ「連防」
-
 2020年03月16日
2020年03月16日新学期に向け、みちびき対応の見守り位置情報端末が続々登場
-
 2020年03月09日
2020年03月09日ボールドライトによるSLAS対応トラッキングシェアシステム
-
 2020年02月25日
2020年02月25日視覚障害者をサブメータ級でみちびく、「あしらせ」のこれから
-
 2020年02月17日
2020年02月17日みちびき対応ブイで海洋モニタリングに挑むブルーオーシャン研究所
-
 2020年02月10日
2020年02月10日NECが消防指令システムに災危通報を表示する小型車載器をリリース
-
 2020年02月03日
2020年02月03日JR東日本メディアが、災危通報対応のデジタルサイネージ用STBを開発
-
 2019年12月02日
2019年12月02日みちびきの災危通報に対応したLED照明灯、和歌山県で点灯式
-
 2019年11月25日
2019年11月25日フジクラとIoTBASEがLPWA活用みちびき対応トラッカーで実証実験
-
 2019年11月05日
2019年11月05日通信途絶下でもメッセージを伝達する「スマホdeリレー」
-
 2019年10月28日
2019年10月28日CLAS活用の測量支援システム「Civil Surveyor QZSS」開発者に聞く
-
 2019年09月30日
2019年09月30日豊田通商などが豪州でみちびきを活用した自動運転車の実証を実施
-
 2019年08月26日
2019年08月26日KDDIとエコモット、北海道で祭り神輿の位置情報サービスを提供
-
 2019年07月22日
2019年07月22日セイコーグループ、機械式腕時計の精度検定にみちびきを活用
-
 2019年07月04日
2019年07月04日ゼンリンデータコム、大分県でトラックから離発着するドローン配送の実証実験
-
 2019年05月20日
2019年05月20日秋田・横手市で排雪作業の軽減対策(2)CLASで排雪車両の位置を高精度モニタリング
-
 2019年05月13日
2019年05月13日秋田・横手市で排雪作業の軽減対策(1)SLAS対応受信機を活用した雪の堆積状況収集
-
 2019年01月15日
2019年01月15日フォルテ、災危通報に対応した新型GNSSトラッカーを今春発売へ
-
 2018年10月31日
2018年10月31日サブメータ級測位補強を実現したMASAのGNSSゴルフウォッチ
-
 2018年10月27日
2018年10月27日GNSSによる高度タイミング用途と、みちびきの役割
-
 2018年10月25日
2018年10月25日[資料] みちびき利活用事例の紹介
-
 2018年10月15日
2018年10月15日ソニー、みちびき対応のIoT通信ネットワーク商用化へ本腰
-
 2018年10月11日
2018年10月11日[実証] 沖縄でのSLAS測位精度検証
-
 2018年10月11日
2018年10月11日[実証] 衛星測位における太陽フレアの影響とSLASの効果
-
 2018年10月09日
2018年10月09日エアロセンスがGNSS搭載した対空標識でドローン測量を効率化
-
 2018年07月19日
2018年07月19日宇治市とソフトバンク、みちびきを活用して路面情報を収集する実証実験
-
 2018年05月21日
2018年05月21日ジェネクストが提供する、みちびき対応の交通安全分析サービス
-
 2018年04月27日
2018年04月27日アシックスとナブテスコが、みちびきを活用して歩行車の位置情報を取得
-
 2018年03月09日
2018年03月09日雪氷対策にGNSS技術を活用するNEXCO東日本の試み
-
 2018年02月27日
2018年02月27日沖電気など4社、みちびき対応の可搬ボート型マルチビーム測深機を発売
-
 2018年02月09日
2018年02月09日NEXCO東日本、北海道で配備した「みちびき活用除雪車」を公開
-
 2018年02月08日
2018年02月08日富士通、みちびきの情報を活用した「Time&Position」ソリューションを提供
-
 2017年10月31日
2017年10月31日勤怠打刻時に位置情報を取得するクラウド型ツール「TeamSpirit」
-
 2017年10月26日
2017年10月26日恵那バッテリー電装、送迎バス向けにLINEを使った位置情報の通知サービス
-
 2017年10月25日
2017年10月25日大和市がデンソーの防犯・防災情報アプリを導入し住民に提供
-
 2017年10月24日
2017年10月24日日本海洋レジャー安全・振興協会、救助サービスに緊急時位置通報システムを導入
-
 2017年10月23日
2017年10月23日成田空港、デジタルサイネージでターミナル連絡バスの運行状況を表示
-
 2017年10月20日
2017年10月20日DeNAと神奈川県タクシー協会がタクシー配車アプリの実用実験
-
 2017年10月19日
2017年10月19日シェアサイクルサービス「モバイク」が札幌での提供を開始
-
 2017年10月18日
2017年10月18日京都府で、位置情報アプリを活用したデジタルスタンプラリー開催中
-
 2017年09月21日
2017年09月21日スマホを活用した認知症高齢者の見守り支援サービス「OSN」
-
 2017年09月20日
2017年09月20日仲間同士で位置情報を共有できるチャットアプリ「Pete」
-
 2017年09月19日
2017年09月19日八ケ岳連峰で位置情報取得、茅野市とSSSが共同で実証実験
-
 2017年09月18日
2017年09月18日夕張市で、車両位置をタブレット管理するスクールバスが稼働
-
 2017年09月08日
2017年09月08日博報堂アイ・スタジオが登山者の位置を把握する「TREK TRACK」提供
-
 2017年09月01日
2017年09月01日スマホでロードサービスを依頼できる救援アプリ「JAFを呼ぶ」
-
 2017年08月24日
2017年08月24日イベントアプリ「こことろ」で、京都府立植物園巡るスタンプラリーを開催
-
 2017年08月15日
2017年08月15日NTT西日本、ひらかたパークお化け屋敷に位置情報を活用した技術協力
-
 2017年08月08日
2017年08月08日高齢者向け位置情報サービス「パルモどっち君」
-
 2017年08月04日
2017年08月04日世界中の混雑状況を確認できるスマホアプリ「混雑マップ」
-
 2017年07月28日
2017年07月28日茨城県の「潮来祇園祭禮」で山車の位置情報をリアルタイム配信
-
 2017年07月27日
2017年07月27日マップル・オン、スマホ向け位置情報ゲーム「Zoic」を提供
-
 2017年07月26日
2017年07月26日KDDI/Wi2/コロプラが訪日外国人の動態調査レポートをセット提供
-
 2017年07月25日
2017年07月25日マップでリアルタイム情報が得られる街歩きアプリ「PASS」
-
 2017年07月18日
2017年07月18日円谷プロが、福島県でウルトラマンのARスタンプラリーアプリを提供
-
 2017年07月05日
2017年07月05日GPS搭載スマホを活用した位置情報管理サービス「MAP-STAR at」
-
 2017年06月14日
2017年06月14日位置情報を使って「上毛かるた」を楽しめるアプリ
-
 2017年05月24日
2017年05月24日福井コンピュータ、GNSS機能を強化した測量用の現場端末システム発売へ
-
 2017年05月23日
2017年05月23日その日の天気に合ったコーディネートを提案する「TNQL」サービス
-
 2017年05月20日
2017年05月20日ベトナムのコクヨ子会社が、GPSで位置情報を管理するMDMサービス導入
-
 2017年05月19日
2017年05月19日静岡新聞社がスマホ向け防災アプリ「TeamBuddy」を提供開始
-
 2017年05月17日
2017年05月17日IoT活用でウインドサーフィンのセール操作を可視化する実証実験
-
 2017年05月15日
2017年05月15日ランサーズが、6月からスキルシェアリングサービス「pook」を提供
-
 2017年05月13日
2017年05月13日立山黒部アルペンルートで来場者向け位置限定ポストカードサービス
-
 2017年05月12日
2017年05月12日東京都下水道局が「東京アメッシュ」スマホ版を提供開始
-
 2017年05月11日
2017年05月11日西濃運輸が配達車両の位置を知らせる「いち知る」サービスを開始
-
 2017年05月10日
2017年05月10日ヴァル研究所、バスの現在地を配信するSkyBrainを提供開始
-
 2017年05月09日
2017年05月09日自動貯金サービス「finbee」、GPS連動で貯金できる新機能を提供開始
-
 2017年05月01日
2017年05月01日ドコモ、LTE対応の通信型ドライブレコーダーを法人向けに提供
-
 2017年04月20日
2017年04月20日水木しげるロードの観光PRに凸版印刷の多言語ARアプリを採用
-
 2017年04月19日
2017年04月19日参加者同士がつながるアプリ連動型ランイベントを表参道で開催
-
 2017年04月18日
2017年04月18日ポッキー&プリッツ春のキャンペーンでスヌーピーを探す位置情報ゲーム
-
 2017年04月14日
2017年04月14日浮世絵名所を訪ねて江戸の旅人気分を味わうアプリ
-
 2017年04月13日
2017年04月13日Facebook Messengerに位置情報のリアルタイム共有機能
-
 2017年03月28日
2017年03月28日地図アプリ「Googleマップ」で位置情報やルートを共有可能に
-
 2017年03月24日
2017年03月24日今いる場所の野鳥が分かるアプリ「GPS動く野鳥図鑑400」
-
 2017年03月19日
2017年03月19日スタンプラリーなど位置情報活用アプリの融合プラットフォーム「StaMap」
-
 2017年03月17日
2017年03月17日古地図にGPSの位置情報を表示できる「Stroly」を提供開始
-
 2017年03月15日
2017年03月15日スマホで遊漁券を買える「つりチケ」にGPS機能を追加
-
 2017年03月08日
2017年03月08日外国人観光客向けアプリ「静岡伊豆ドリームナビ」などで実証実験
-
 2017年03月07日
2017年03月07日「さんぽで三県!! 三県境」モバイルスタンプラリー開催中
-
 2017年03月06日
2017年03月06日地下のライフラインを「見える化」するシステム [前編]
-
 2017年03月06日
2017年03月06日地下のライフラインを「見える化」するシステム [後編]
-
 2017年02月28日
2017年02月28日車載用IoT端末「MCCS」で新興国向けのローンファンドを運用
-
 2017年02月20日
2017年02月20日GPSに連動した多言語による観光ガイドシステムU・feel
-
 2017年02月09日
2017年02月09日GPS搭載端末「MOVOスティック」で車両運行をリアルタイム管理
-
 2017年02月07日
2017年02月07日互助交通がタクシー利用者向けにGPS連動アプリを提供
-
 2017年02月06日
2017年02月06日除雪車の位置情報管理サービス商用化に向け、岐阜県で実証実験
-
 2017年02月05日
2017年02月05日ボタンを押せば配車可能なタクシー会社へ電話できる「タクシーチャンピオン」
-
 2017年01月30日
2017年01月30日ウェザーニューズ、今年も花粉情報を配信する「花粉Ch.」をオープン
-
 2017年01月26日
2017年01月26日桐生市を舞台にしたスマホ用GPSゲームアプリと観光ガイド
-
 2017年01月24日
2017年01月24日奈良県が街巡りに特化した観光アプリ「ならたん」を提供
-
 2017年01月23日
2017年01月23日現在地周辺の犯罪情報を探せる治安情報サイト「ガッコム安全ナビ」
-
 2017年01月22日
2017年01月22日ARで"ビーコル"のバスケ選手と出会える位置情報アプリ「バスケベ!GO」
-
 2017年01月17日
2017年01月17日JR東海、3次元測量で枕木の厚さを高精度に測る装置を開発
-
 2017年01月16日
2017年01月16日セレボ、GPS搭載の自転車用IoTデバイス「RIDE-1」を発売
-
 2017年01月15日
2017年01月15日雪山での滑走経路をスマホに記録できる「Snoway」
-
 2017年01月11日
2017年01月11日神奈川の3市が共同で多言語対応の観光アプリ「おおやまめぐりガイド」
-
 2017年01月05日
2017年01月05日ドライバー向けデジタルラジオ「Amanekチャンネル」で地域活性プロジェクト
-
 2016年12月21日
2016年12月21日Googleが毎年恒例のアプリ「サンタトラッカー」で位置情報ゲームを提供
-
 2016年12月20日
2016年12月20日位置情報で農業経営を支援するヤンマーのスマートアシスト リモート
-
 2016年12月18日
2016年12月18日日産が自動運転技術による無人搬送システムを導入
-
 2016年11月24日
2016年11月24日凸版印刷と日の丸リムジンが古地図で江戸観光するタクシーツアーを開始
-
 2016年11月22日
2016年11月22日ゲレンデで現在地が分かるスキー情報情報アプリ「yukiyama」
-
 2016年11月14日
2016年11月14日地図上に画像や情報を記録し、自分だけの地図を作成する「Map Life」
-
 2016年11月07日
2016年11月07日人気キャラ「ハローキティ」の携帯電話が「位置情報」検索に対応
-
 2016年10月26日
2016年10月26日安価な専用端末とスマホを組み合わせた見守りサービス「otta」
-
 2016年10月24日
2016年10月24日マピオン、地図と位置情報を活用した教育アプリの提供を開始
-
 2016年10月21日
2016年10月21日マピオン、観光パンフの電子配信「e-旅めくり」で自治体の観光戦略支援
-
 2016年10月20日
2016年10月20日Google VRに対応したスマホ用の星空アプリ「プラネタリウムVR」
-
 2016年10月11日
2016年10月11日福井県がGPS発信機を装着したコウノトリ2羽を放鳥
-
 2016年10月17日
2016年10月17日[続報] 写真で見る福井県コウノトリ放鳥の舞台裏
-
 2016年10月10日
2016年10月10日良心石材、Jリーグ戦スタジアム来場者のスマホに選手のAR映像を提供
-
 2016年10月05日
2016年10月05日バンダイナムコ、位置情報と音声を組み合わせた「ブラメディア」を提供開始
-
 2016年10月03日
2016年10月03日埋もれた観光スポットを発見するデータメディア「spot japan」
-
 2016年09月27日
2016年09月27日SNSで訪日外国人の消費動向を分析する「ロケーショントレンドレポート」
-
 2016年09月26日
2016年09月26日地震発生時に現在地情報を自動通知する防災アプリ「Familoca」
-
 2016年09月22日
2016年09月22日特定スポットでレアな魚を取得できる位置情報アプリ「MyAquarium3D」
-
 2016年09月16日
2016年09月16日「だんじり」の岸和田市、無料観光アプリにハザードマップも搭載
-
 2016年09月10日
2016年09月10日想い出の場所を登録し、動画や写真を届けるアプリ「Spot message」
-
 2016年09月04日
2016年09月04日凸版印刷が店舗射程圏内ユーザーを誘客する「ココチラ」を提供
-
 2016年09月02日
2016年09月02日楽天トラベル、観光パンフ閲覧アプリ「PATW」を発表
-
 2016年08月31日
2016年08月31日横須賀市が位置情報ゲーム活用に向け、ヨコスカGO宣言を発表
-
 2016年08月27日
2016年08月27日現在地の地盤の安全性を確認できる「じぶんの地盤アプリ」
-
 2016年08月17日
2016年08月17日過酷な日本縦断トレイルランレースでGPSトラッキングシステム導入
-
 2016年08月08日
2016年08月08日クラウド型勤怠管理サービス「AKASHI」にGPS打刻機能が追加
-
 2016年08月06日
2016年08月06日マピオンと学研が、写真と地図で夏の自由研究を簡単作成するアプリ
-
 2016年08月03日
2016年08月03日スタンプラリーアプリ「ヤマスタ」が、日本百名山イベントを追加
-
 2016年08月02日
2016年08月02日天草のパラグライダーレースでリアルタイム測位システムを検証
-
 2016年07月30日
2016年07月30日凸版印刷がVRとGPSによる「ストリートミュージアム」で新展開
-
 2016年07月25日
2016年07月25日花火の見え方をスマホで事前確認できる「AR花火スコープ」
-
 2016年07月20日
2016年07月20日位置と時間にフォーカスしたライフログアプリ「.location」
-
 2016年07月17日
2016年07月17日GPS応用の速度計でビジネス展開する「バイオスシステム」 [前編]
-
 2016年07月18日
2016年07月18日GPS応用の速度計でビジネス展開する「バイオスシステム」 [後編]
-
 2016年07月14日
2016年07月14日ジョルダン、全世界で利用できる安否確認システムを10月に提供開始へ
-
 2016年07月13日
2016年07月13日ヤマハが衛星測位で無人自律航行できる小型電動観測艇を発表
-
 2016年07月05日
2016年07月05日高崎市、高齢者向けGPS端末の無料貸出を障害者にも拡大
-
 2016年06月07日
2016年06月07日車両の走行状況で保険料率が変わる「テレマティクス保険」
-
 2016年05月26日
2016年05月26日軽貨物配送のマッチングサイト「ハコブリッジ」
-
 2016年05月24日
2016年05月24日観光コンテンツを活性化。青森発ベンチャー「ナビチャリ」への期待
-
 2016年05月18日
2016年05月18日オフラインでGPSルート検索可能な海外観光アプリ「HowTravel」
-
 2016年05月11日
2016年05月11日クボタ、業界初のGPS田植え機を9月に発売
-
 2016年04月20日
2016年04月20日オープンデータで避難所地図を表示する「ヒナンパス」が、熊本地震に暫定対応
-
 2016年03月27日
2016年03月27日「飯田お練りまつり」に位置情報のクラウドサービス導入
-
 2016年03月23日
2016年03月23日車両情報と位置情報でリアルタイムに社用車を管理する「ProPosition」
-
 2016年02月18日
2016年02月18日佐賀で産官学が連携し、ドローン空撮で無農薬・減農薬栽培の害虫探し
-
 2016年01月23日
2016年01月23日「サイレントログ」で生活記録に位置情報を追加する
-
 2015年12月22日
2015年12月22日携帯圏外でもスマートフォンのGPSナビが使える「Geographica」
-
 2015年11月27日
2015年11月27日鳥取市の「1000円タクシー」が位置情報で翻訳精度上げる社会実証
-
 2015年11月25日
2015年11月25日街の利便性向上に位置情報を役立てる富山市の「おでかけっち」
-
 2015年11月03日
2015年11月03日岩手県滝沢市が「モバイル登山届」を導入へ
-
 2015年10月25日
2015年10月25日福井で放鳥された2羽のコウノトリが位置情報を発信中
-
 2015年10月06日
2015年10月06日ラグビーやサッカーに使われるGPSportsの衛星トラッキングシステム
-
 2015年10月01日
2015年10月01日高円寺の阿波踊りで「踊る阿呆」を追跡するシステム
-
 2015年09月25日
2015年09月25日警報に連動して位置情報を自動通知する『ココダヨ』サービス
-
 2015年09月24日
2015年09月24日高崎市が徘徊高齢者をGPSで発見する救援システム運用へ
-
 2015年09月21日
2015年09月21日安全で楽しい登山を! 緻密なプランニングを可能にする「ヤマプラ」
-
 2015年09月20日
2015年09月20日来年配信のポケモン最新作は、位置情報を活用したスマホゲーム
-
 2015年09月15日
2015年09月15日JR東日本がGPSを活用した列車接近警報装置を開発導入
-
 2015年09月14日
2015年09月14日“爆買い”を加速!? 位置情報でピンポイントの広告配信
-
 2015年09月11日
2015年09月11日東芝がGPS機能付き腕時計型生体センサ「Silmee W21」を11月発売
-
 2015年09月10日
2015年09月10日陸上自衛隊が富士通の災害救助活動支援サービスを導入
-
 2015年09月09日
2015年09月09日「最短20分!」という楽天の新・配送サービス
-
 2015年09月07日
2015年09月07日山形の新庄まつりで山車の位置把握にGPSを導入
-
 2015年09月02日
2015年09月02日SNSと位置情報を連動させるO2Oサービス「Social Beacon」が始動
-
 2015年08月21日
2015年08月21日奈良市、認知症高齢者の見守りにGPS端末貸出を開始
-
 2015年08月14日
2015年08月14日GPSで現在地を示して不便を解消。東京都交通局の「バスロケシステム」
-
 2015年08月13日
2015年08月13日コロプラとKDDIが共同で位置情報ビッグデータの分析サービス
-
 2015年08月12日
2015年08月12日GPS機能を活用して、今いる場所にスピーディな宅配サービスを実現
-
 2015年08月05日
2015年08月05日弘前市、公用車にGPS機能を搭載した車両管理システムを導入
-
 2015年07月23日
2015年07月23日全国の花火大会を位置情報ゲームで回るイベント、9月まで開催中
-
 2015年07月15日
2015年07月15日位置情報でアウトドアライフを後押しする登山者向けコミュニティ「YAMAP」
-
 2015年07月13日
2015年07月13日UPRとKDDIが温度・湿度を管理できる位置情報端末「なんつい」を開発
-
 2015年07月09日
2015年07月09日ペットや子どもの迷子を防ぐ! GPS機能搭載の迷子札「BiKN」のシステム
-
 2015年06月25日
2015年06月25日北海道で活用が進む、農業用GPSガイダンスシステム
-
 2015年06月11日
2015年06月11日[実証] 都市部でのQZ1測位モード比較
-
 2015年05月20日
2015年05月20日日本交通が提供する位置情報を活用したタクシー配車アプリ
-
 2015年04月22日
2015年04月22日NTTドコモが、位置情報を活用したモビリティシェア事業で新たな取り組み
-
 2015年03月23日
2015年03月23日神奈川・横須賀市が、位置情報ゲーム「Ingress」で観光振興
