








ロボットカーコンテスト2014:大会要項
2015年1月19日改訂
準天頂衛星システムサービス株式会社
1. 開催趣旨
このコンテストは、GPSおよびQZSSを利用する研究者や技術者の相互交流、ならびに大学や高等専門学校等の学生に対する衛星測位に関する基礎技術の修得機会の提供及び技術交流を目的として開催する。
2. 競技概要
衛星測位しながら自律走行する自作のロボットカーで競技する。以下の2種類の競技を行う。
〈ダブルパイロンレース〉
2つのWaypointを周回することにより得られるポイントを競う
〈QZSSスクランブル〉
準天頂衛星システム(QZSS)の簡易メッセージ(災危通報)で指定されたルートを走行し、走行時間の短さを競う
ダブルパイロンレース、QZSSスクランブルのどちらか一方、もしくは両方に参加することができる。
3. 競技日時/会場
3.1. 競技日時
2014年10月18日(土) 午後1時~午後4時
3.2. 競技会場
4. 参加資格
競技規定に合致するロボットカーを製作することができ、当日、競技に参加できる個人または団体。所属学校組織や企業の別を問わない。一般個人や小中学生の参加も歓迎する。競技の見学のみも可能とする。
5. ロボットカーのハードウェアレギュレーション
5.1. ロボットカーの動力
原則として電動とする。
5.2. ロボットカーの航法センサー
主な航法センサーとしてGPS受信機を搭載し、制御プログラムに従い、自律的に走行するものであること。使用するGPS受信機やマイコンは、一般に市販されている製品を利用することが望ましいが、情報公開をおこなうことを前提に、改造された受信機での参加も歓迎する。利用できる衛星はGPS、QZSS及びSBASとし、これら以外の衛星は受信機単体での測位方式であれば利用できる。GPS、QZSS及びSBAS以外の衛星を用いる場合は、必ずその旨を大会事務局に知らせること。競技中の遠隔操作は不可とし、すべての自律制御部(ハード/ソフトともに)がロボットカーに搭載されていなければならない。ただし、ロボットカーの状態をモニタリングするために外部への通信を行うことはできる(この場合、遠隔操作をしていないことを主審に対して説明できること)。
5.3. ロボットカーの寸法
次のいずれかを満たすこと。
1.競技中の姿勢での高さが400mm以下,幅が500mm以下,奥行きが500mm以下であること
2.ロボットを分解して鞄に入れて運ぶ際、鞄のサイズの3辺の合計が115cm以内でかつ55cm×40cm×25cm以内(鞄については各競技者が用意する。なお、このサイズは、国内線航空機内(100席以上)に持ち込みできる大きさを参考にしている。)
5.4. ロボットカーの重量
合計で9kg以下であること。これには自律走行に必要なすべての機器の重量が含まれるが、セットアップ時のみ接続して競技中は取り外す機器(ノートパソコンやバッテリー充電器等)は除く。
5.5. 例外
参加者として大会事務局が認めた場合は、前述の限りではない。無人飛行機などもエキシビション参加者として認めることがある。ただし、競技場を壊したり、人を傷つけたりする恐れのあるロボットカー等については、大会事務局の判断で、走行・飛行を認めない
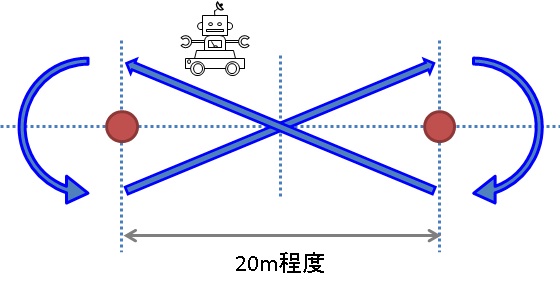
6. ダブルパイロンレース ルール
2つのWaypointを周回することにより得られるポイントを競う。Waypointの座標は開催当日にアナウンスされる。
6.1. 競技場
≪Waypoint≫
Waypointの数は2つとし、その間隔は20m程度とする。正確な座標値は、大会当日に発表する。Waypointの中心には目印が設定され、例えばパイロンを予定しているが、形状についてはこの限りではない。パイロン等に衝突しても失格にはならないが、ロボットカーはこれを回避することが望ましい。パイロンは主審がWaypointの通過を判断するための目印として置かれたものであり、これらをナビゲーションの目印にすることは大会の主旨から外れるため不可とする。ロボットカーの衝突等によりパイロン等が移動した場合でも、それらの元の位置をWaypointとする。パイロン等の目印は、Waypointだけ置かれるとは限らず、Waypoint以外の場所にも置く事がある(競技エリアの境界線の表示など)。
≪スタート地点≫
2つのWaypointを結ぶ直線の真ん中の点上とする。
6.2. 競技の流れ
主審より準備の指示を受けたら、競技者はロボットカーをスタート地点に置くこと。スタート地点におけるロボットカーの向きは任意である。競技者は準備ができたらスタートできることを主審に伝える。
≪競技時間≫
競技時間は、3分とする。主審がスタートの宣言をしたら、タイムキーパーは競技時間の計測を開始する。競技時間内であれば、何度でも競技を行う事ができる。ただし、参加台数によっては、競技時間を短くしたり、複数回の試技を認めたりする場合もある。
≪パイロンの回り方≫
ロボットカーは、自律走行により∞の様に回ること。主審は、Waypointの通過によるポイントを判定する。記録係は、主審の判定に従ってポイントを記録する。∞の周り方はどちらでも構わない。また、交差する地点はWaypoint間であればどこでもよい。
6.3. リトライおよび救済措置
≪リトライ≫
競技時間内であれば、競技者は何度でもリトライを宣言することができる。リトライは、競技者が主審に対して宣言し、それを主審が認めたときに適用される。リトライが認められた場合、それまでのすべての得点が無効になる。競技者は再度ロボットカーの調整などを行う事ができるが、競技時間はリトライによってリセットされない。準備が整い次第、競技者は主審に再スタートを宣言し、主審の許可を得た後、ロボットカーを再スタートさせることができる。
≪救済措置≫
救済措置とは、ロボットカーが障害物を避ける事ができずに競技場内で立ち往生した場合に、競技者が障害物を移動させたり、ロボットカーの向きを変えたりすることができる措置を言う。競技者が主審に対して救済措置の適用を宣言し、それを主審が認めるときに適用される。救済措置が認められた場合、それまでのポイントはリセットされない。救済措置の適用は5回までとする。ロボットカーの向きを変えるのは、競技者自身がロボットカーをその場で回転させて進行方向を変えたり、パイロン等の障害物を動かしたりすることができる。パイロン等を移動したときはロボットカーの通過後にすみやかに元の場所に戻すこと。
≪競技終了≫
競技時間内であれば、競技者は競技終了の宣言をすることができる。競技者が主審に対して競技終了の適用を宣言し、それを主審が認めるときに適用される。競技終了が認められた場合、それまでに得ていた得点が適用される。再スタートはできない。
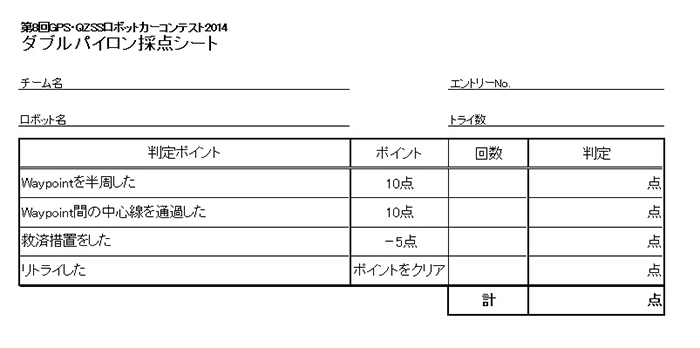
6.4. 得点および減点
走行競技は、ダブルパイロン(2つのWaypoint)を正確に往復する回数と、コースを走行する速さを競い、競技終了時での合計ポイントを得点とする。競技者が主審に救済措置を申告し、ロボットカーや障害物に触れた場合は、合計ポイントから減点をする。
≪得点≫
Waypointの周囲を180度回った時点で、得点10点を獲得する。右回りと左回りについての違いはない。2つのWaypointを通過した後にWaypoint間の中心線を通過した時点で1往復と見なし、さらに10点を獲得する。
≪減点≫
救済措置を適用した場合は、1回につき5点を合計ポイントから減点する。
6.5. 表彰
1位から3位までの入賞者にはNexus7(2012 Wi-Fiモデル)を贈呈する。
7. QZSSスクランブル ルール
準天頂衛星システム(QZSS)の簡易メッセージ(災危通報)で指定されたルートを走行し、走行時間の短さを競う。
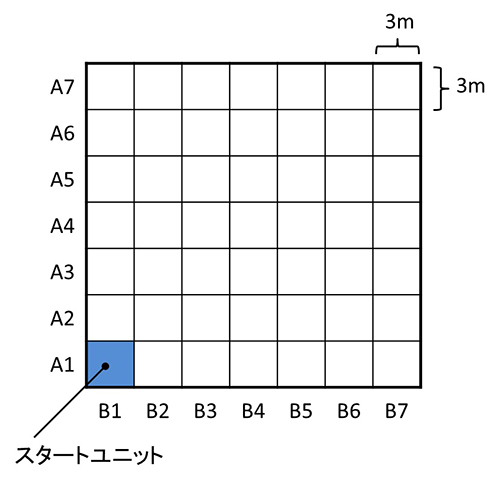
7.1. 競技場
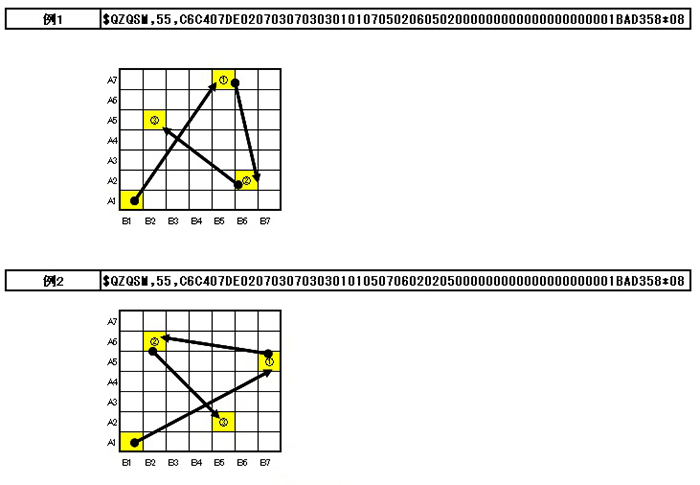
≪コート≫
3m四方のユニットが7×7ならんだグリッドをコートとする。各ユニットの位置は(Am,Bn)(m,nは1~7)で指定する。コンテスト当日に(A1,B1)、(A7,B1)、(A1,B7)の中心座標を大会事務局より公表する。
≪スタートユニット≫
スタートユニットは(A1,B1)とする。
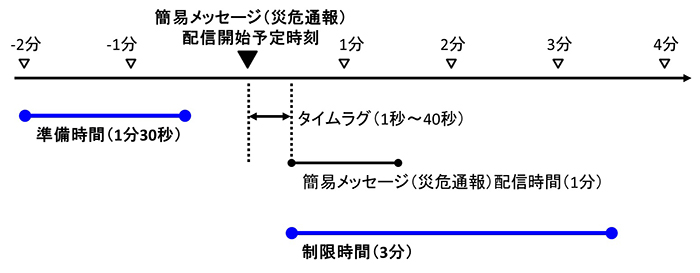
7.2. 競技の流れ
1.競技者は各自に対して指定された簡易メッセージ(災危通報)配信時刻の2分前にスタートユニット内へロボットカーを置き電源を入れる。
2.簡易メッセージ(災危通報)配信開始予定時刻の30秒前になるとタイムキーパーより合図があるので、競技者はコートより離れる。
3.簡易メッセージ(災危通報)を通じてターゲットユニットが3か所指定される。指定されるターゲットユニットは各レースにより異なる。(よって、QZSSスクランブルに出場するロボットカーは、準天頂衛星(QZSS)の簡易メッセージ(災危通報)を受信して、スタートの制御、および、ターゲットユニットの解読ができること。)
4.簡易メッセージ(災危通報)配信タイミングは1秒~40秒のタイムラグがあるので注意すること。
5.簡易メッセージ(災危通報)は取りこぼしを想定して6秒間隔で1分間同一内容のデータを配信する。
6.最初の簡易メッセージ(災危通報)が配信されたら、大会本部が配信されたことを会場に通知する。
7.ロボットカーは簡易メッセージ(災危通報)を受信したら、ロボットカーのランプを点灯して受信したことをアピールしてスタートする。
8.ロボットカーはターゲットユニットに到着したら5秒間停止し、ランプを点灯して到着したことをアピールする。
9.最初の簡易メッセージ(災危通報)が配信されてから、ロボットカーが3番目のターゲットユニットに到着してアピールが完了するまでを走行時間とする。制限時間は最初の簡易メッセージ(災危通報)が配信されてから3分間とする。
10.制限時間内に3番目のターゲットユニットに到着できなかった場合はその時点で競技を終了する。この場合走行時間は3分とする(別途次に示す罰則時間が加算される)。
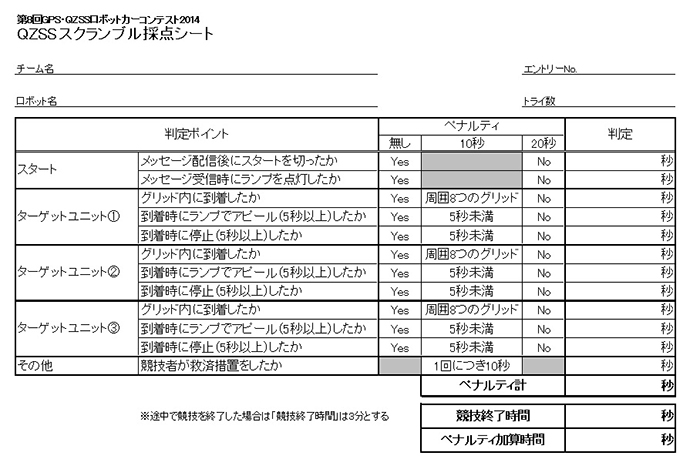
7.3. 罰則時間の加算
以下の場合は罰則時間を加算する。罰則時間は主審が判定する。
・簡易メッセージ(災危通報)配信開始前にロボットカーがスタートユニット外へ出た場合
・スタート、および、ターゲットユニット到着のアピールが不十分であった場合(停止が5秒未満、ランプがつかない等)
・ターゲットユニット外で到着のアピールがあった場合(罰則時間はターゲットユニットからの距離に応じる。ターゲットユニットにロボットカーの一部でも接している場合はターゲットユニット内にあるものとみなす)
・制限時間内に3番目のターゲットユニットに到着できなかった場合
7.4. 簡易メッセージ(災危通報)フォーマット
配信する簡易メッセージ(災危通報)のフォーマットは、2014年9月上旬に応募者へ通知する。
簡易メッセージ(災危通報)のテスト配信を2014年9月上旬~11月中旬に実施する予定(日程の詳細は別途通知する)。

7.5. 受信機の貸出
簡易メッセージ(災危通報)が受信可能な受信機を貸し出しいたします。詳細は下記問合せ先にお問い合わせください。
7.6. 表彰
1位から3位までの入賞者には次の表彰を行う。
Nexus7(2012 Wi-Fiモデル)の贈呈
G空間Expo2014(11月15日(土))の招待(交通費、および、宿泊費のサポート)
※G空間Expo2014にてエキシビションレースに参加して頂きます。
8. 再走
全ての競技者の競技が終了した後、時間に余裕がある場合は再走を認める。再走した場合は最も良い結果を採用する。
9. その他
1.当日の天候や開場の状況によっては、コンテストが中止される場合もある。中止の判断は、大会事務局が行う。競技のルールに不備な点などが認められた場合は、追加のルール等について主審と大会事務局の合議で決める。
2.結果発表および順位の決定は、当日の競技直後に行う。
-
 2026年06月04日
2026年06月04日[告知] 6/17-20国際 建設・測量展に出展・セミナー開催します
-
 2026年06月18日
2026年06月18日[速報] 6/17-20国際 建設・測量展に出展しています
-
 2026年07月27日
2026年07月27日[報告]「第8回 国際 建設・測量展」でみちびきのセミナーと展示
-
 2026年06月01日
2026年06月01日[報告] 地理空間情報の関連企業等が集結する「ジオ展2026」に出展
-
 2026年05月25日
2026年05月25日[報告] みちびきを高度利活用する4者の技術座談会
-
 2026年04月27日
2026年04月27日[報告] 山口放送の惠良氏が宇宙開発利用大賞で地域特別賞を受賞
-
 2026年04月20日
2026年04月20日[報告] 大阪商工会議所で企業向けにみちびき活用セミナー開催
-
 2026年04月13日
2026年04月13日[報告] 農業エレクトロニクスをテーマにトラ技と共同オフ会を開催
-
 2026年03月30日
2026年03月30日[報告] 大田区で宇宙関連スタートアップと製造業の交流会を開催
-
 2025年07月23日
2025年07月23日[告知] 今年も「イチBizアワード2025」にみちびきが協賛
-
 2026年03月23日
2026年03月23日[報告] イチBizアワードでみちびき活用した位置誘導植栽機が最優秀賞
-
 2026年03月11日
2026年03月11日[報告] 高専生によるみちびき災危通報を活用したハッカソン
-
 2026年03月02日
2026年03月02日[報告] 自治体によるみちびき活用事例の紹介セミナーを開催
-
 2026年02月24日
2026年02月24日[報告] 相模原市立橋本小学校でみちびきアイディアソンを開催
-
 2026年02月09日
2026年02月09日[報告] ILS 2025で「みちびきビジネス交流会」を開催
-
 2026年02月02日
2026年02月02日[報告] みちびき7号機の機体公開
-
 2025年12月26日
2025年12月26日[告知] G空間EXPO2026でみちびきの展示と講演会
-
 2026年01月29日
2026年01月29日[速報] G空間EXPO2026にみちびきブースを出展
-
 2026年03月16日
2026年03月16日[報告] G空間EXPO2026でみちびきのセミナーと展示
-
 2026年01月26日
2026年01月26日[報告] GNSS・QZSSロボットカーコンテスト2025を開催
-
 2026年01月19日
2026年01月19日[報告] 筑波宇宙センター特別公開にみちびきも参加
-
 2026年01月13日
2026年01月13日[報告] NECがみちびきに関するメディア向け説明会を開催
-
 2025年10月21日
2025年10月21日[告知] 10/30「NIHONBASHI SPACE WEEK 2025」でみちびきセッションを開催
-
 2026年01月08日
2026年01月08日[報告] NIHONBASHI SPACE WEEK 2025でみちびきの利活用を紹介
-
 2025年11月17日
2025年11月17日[報告] 国土交通省性能評価センターで「空の日」一般公開
-
 2025年10月06日
2025年10月06日[告知] CEATEC 2025でみちびき利活用の講演セッションと展示
-
 2025年10月14日
2025年10月14日[速報] CEATEC 2025、幕張メッセで開催中
-
 2025年11月26日
2025年11月26日[報告] CEATEC 2025でみちびきに関する講演と展示
-
 2025年09月12日
2025年09月12日[告知] 9/24-25に名古屋で開催される第4回ドローンサミットに参加
-
 2025年11月11日
2025年11月11日[報告] 名古屋で行われた第4回ドローンサミットに参加
-
 2025年09月05日
2025年09月05日[告知]「第7回宇宙開発利用大賞」の募集開始について
-
 2025年08月27日
2025年08月27日[告知]「ぼうさいこくたい2025 in 新潟」のご案内
-
 2025年11月04日
2025年11月04日[報告]「ぼうさいこくたい2025 in 新潟」でみちびきに関する講演会
-
 2025年07月24日
2025年07月24日[告知] 7/28-29静岡・駿河湾で開催される「海のEXPO」に出展
-
 2025年09月01日
2025年09月01日[報告] 静岡市で行われた「海のEXPO」でみちびきの講演と展示
-
 2025年06月23日
2025年06月23日[告知] 8/9秋葉原「トランジスタ技術 エレキ万博2025」にみちびきが参加
-
 2025年09月24日
2025年09月24日[報告] エレキ万博2025にみちびきが参加
-
 2025年07月03日
2025年07月03日[告知] 7/23~25メンテナンス・レジリエンスTOKYO 2025に参加
-
 2025年08月25日
2025年08月25日[報告] メンテナンス・レジリエンスTOKYO 2025でみちびきに関する講演
-
 2025年07月03日
2025年07月03日[告知] 7/13種子島宇宙センター特別公開にみちびきも参加
-
 2025年08月07日
2025年08月07日[報告] 種子島宇宙センター特別公開にみちびきも参加
-
 2025年03月27日
2025年03月27日[報告] みちびきの防災分野への活用をテーマにセミナー開催
-
 2025年03月18日
2025年03月18日[報告] イチBizアワードで配達員保険システムがみちびき賞を受賞
-
 2025年03月03日
2025年03月03日[報告] トランジスタ技術とみちびきコミュニティの共同オフ会を開催
-
 2025年01月20日
2025年01月20日[報告] ILS 2024でピッチやブース展示を実施
-
 2025年01月16日
2025年01月16日[報告] NIHONBASHI SPACE WEEK 2024でみちびきに関する講演を実施
-
 2025年01月08日
2025年01月08日[告知]「G空間EXPO2025」みちびき特別講演会のご案内
-
 2025年03月12日
2025年03月12日[報告] G空間EXPO2025でみちびきに関する講演と展示
-
 2024年12月09日
2024年12月09日[報告] GNSS・QZSSロボットカーコンテスト2024を開催
-
 2024年09月30日
2024年09月30日[告知] 幕張メッセで10/15~18、CEATEC 2024開催
-
 2024年10月16日
2024年10月16日[速報] CEATEC 2024を幕張メッセで開催
-
 2024年11月25日
2024年11月25日[報告] CEATEC 2024でみちびきに関する講演と展示
-
 2024年09月17日
2024年09月17日[告知] 10/1-2に札幌市で開催される第3回ドローンサミットに参加
-
 2024年11月18日
2024年11月18日[報告] 第3回ドローンサミットで展示・講演・飛行デモを実施
-
 2024年09月12日
2024年09月12日[報告] 三重県尾鷲市でRPD Challenge 2023 Winners Invitation Programを開催
-
 2024年08月29日
2024年08月29日[報告] 宇宙・測位ビジネスの新たな可能性を探るみちびきセミナー開催
-
 2024年07月17日
2024年07月17日[告知] メンテナンス・レジリエンスTOKYO 2024に出展
-
 2024年07月24日
2024年07月24日[速報] メンテナンス・レジリエンスTOKYO 2024をビッグサイトで開催中
-
 2024年09月09日
2024年09月09日[報告] メンテナンス・レジリエンスTOKYO 2024でみちびきに関する講演
-
 2023年11月29日
2023年11月29日[告知] ILS 2023でみちびきスタートアップピッチを開催
-
 2024年01月15日
2024年01月15日[報告] ILS 2023でピッチやブース展示を実施
-
 2023年11月22日
2023年11月22日[報告] 国土交通省性能評価センターの一般公開でみちびきや地上局アンテナを紹介
-
 2023年10月19日
2023年10月19日[告知]「第6回宇宙開発利用大賞」募集開始のご案内
-
 2023年10月16日
2023年10月16日[告知] 11/9開催、みちびきアイデアソンの参加者募集中
-
 2023年12月27日
2023年12月27日[報告] みちびきアイデアソンを開催
-
 2023年10月06日
2023年10月06日[告知] 今年もロボットカーコンテストを10/22に開催
-
 2023年11月27日
2023年11月27日[報告] GNSS・QZSSロボットカーコンテスト2023を開催
-
 2023年10月04日
2023年10月04日[告知] CEATEC 2023、10/17~20に幕張メッセで開催
-
 2023年10月18日
2023年10月18日[速報] CEATEC 2023を幕張メッセで開催
-
 2023年11月13日
2023年11月13日[報告] CEATEC 2023でみちびきに関する講演
-
 2023年10月24日
2023年10月24日[告知]「G空間EXPO 2023」ウェビナー及び出展のご案内
-
 2023年11月13日
2023年11月13日「みちびきウェビナー ~みちびき利活用最前線 in G空間EXPO 2023~」アーカイブ配信
-
 2023年12月11日
2023年12月11日[報告] みちびき、G空間EXPO 2023に出展
-
 2023年12月18日
2023年12月18日[報告]「みちびきウェビナー2023」を開催しました
-
 2023年10月02日
2023年10月02日[告知] 10/11-13のスマート農業EXPOにみちびきブースを出展
-
 2023年11月02日
2023年11月02日[報告] スマート農業EXPOにみちびきブースを出展
-
 2023年09月11日
2023年09月11日[告知] 9/29に佐世保の海洋DXカンファレンスで内閣府が基調講演
-
 2023年08月31日
2023年08月31日[告知] 9/7-8に長崎で開催されるドローンサミットに内閣府も参加
-
 2023年10月05日
2023年10月05日[報告] 長崎のドローンサミットでみちびき対応ドローンのデモや講演を実施
-
 2023年08月08日
2023年08月08日[告知] 9/1-2 福島ロボテスフェスタでみちびき展示・デモ・講演を実施
-
 2023年09月29日
2023年09月29日[報告] ロボテスフェスタでみちびき対応機器のデモや講演会を実施
-
 2023年08月02日
2023年08月02日[告知] 自動車技術会が9/13にみちびき講演会を開催します
-
 2023年10月11日
2023年10月11日[報告] 自動車技術会関東支部と共催で「みちびき講演会」を開催
-
 2023年06月27日
2023年06月27日[告知] 7/20に「みちびき講演会2023 in 北海道」を開催します
-
 2023年09月04日
2023年09月04日[報告] 札幌にて「みちびき講演会2023 in 北海道」を開催
-
 2023年05月15日
2023年05月15日「みちびきコミュニティ」2022年度活動報告を公開しました
-
 2023年04月05日
2023年04月05日[告知] 4/6に都内でみちびきのサービス開発の可能性探るセッション開催
-
 2023年04月24日
2023年04月24日[報告] ベンチャーカフェ東京でみちびきを紹介するピッチを開催
-
 2023年02月21日
2023年02月21日[告知] 内閣府とQSSが2/27-28開催のCity-Tech.Tokyoに出展
-
 2023年02月27日
2023年02月27日[報告] City-Tech.Tokyoに内閣府とQSSが参加
-
 2022年11月17日
2022年11月17日[告知]「G空間EXPO 2022」ウェビナー及び出展のご案内
-
 2022年12月19日
2022年12月19日[報告] みちびき、G空間EXPO 2022に出展
-
 2023年01月25日
2023年01月25日[報告] みちびきウェビナーを開催しました
-
 2022年12月12日
2022年12月12日「みちびきウェビナー ~みちびき利活用最前線 in G空間EXPO 2022~」アーカイブ配信
-
 2022年11月14日
2022年11月14日[告知] 第10回ILSで11/29、みちびきスタートアップピッチを開催
-
 2022年12月05日
2022年12月05日[報告] 第10回ILSでスタートアップピッチやブース展示を実施
-
 2022年10月18日
2022年10月18日[告知] ロボットカーコンテスト2022を10月22日に開催
-
 2022年11月07日
2022年11月07日[報告] GNSS・QZSSロボットカーコンテスト2022を開催
-
 2022年09月12日
2022年09月12日[告知] 9/28-30の衛星測位・位置情報展(SATEX)に出展
-
 2022年10月24日
2022年10月24日[報告] SATEXへブース出展し、みちびき活用事例・製品紹介のセミナーを開催
-
 2022年08月25日
2022年08月25日[告知] 9月の福島・ロボテスEXPOでみちびきの展示・デモ・講演を実施
-
 2022年10月31日
2022年10月31日[報告] ロボテスEXPOでみちびき対応ドローンやUGVデモ、講演会を実施
-
 2022年07月01日
2022年07月01日[告知] 琵琶湖のトライアスロン大会でSLASを活用した実証実験
-
 2022年08月19日
2022年08月19日[報告] 琵琶湖のトライアスロン大会でSLASを活用した実証実験を実施
-
 2022年06月03日
2022年06月03日[告知] Japan Drone 2022(6/21-23)に出展します
-
 2022年06月21日
2022年06月21日[報告] Japan Drone 2022にみちびき展示ブースを出展
-
 2022年02月14日
2022年02月14日[報告] SATEXでみちびきの高精度測位に関するセミナーを実施
-
 2022年02月02日
2022年02月02日[報告] 衛星測位・位置情報展(SATEX)に出展
-
 2021年11月01日
2021年11月01日[告知] 日欧GNSS官民ラウンドテーブルを11/25-26に開催
-
 2021年12月15日
2021年12月15日[報告] 第5回日欧GNSS官民ラウンドテーブルを開催
-
 2021年12月06日
2021年12月06日[告知] G空間EXPO 2021にブース出展
-
 2021年12月07日
2021年12月07日[報告] みちびき、G空間EXPO 2021にブース出展
-
 2021年11月22日
2021年11月22日[告知] 今年2回目のみちびきウェビナーを12/10に開催
-
 2021年12月24日
2021年12月24日[報告] 今年2回目のみちびきウェビナーを開催しました
-
 2021年11月29日
2021年11月29日[報告] GNSS・QZSSロボットカーコンテストをリモート開催
-
 2021年09月21日
2021年09月21日[告知] 10/12に「みちびきウェビナー」を開催
-
 2021年10月26日
2021年10月26日[報告] みちびきウェビナーを開催しました
-
 2021年09月17日
2021年09月17日[報告] みちびき利用ハッカソン「RPD Challenge 2020」を開催
-
 2021年07月14日
2021年07月14日[告知] 7月15~28日の「Society 5.0科学博」でみちびき関連展示
-
 2021年06月07日
2021年06月07日[告知] 6月14~16日開催の「Japan Drone 2021」に出展します
-
 2021年06月14日
2021年06月14日[報告] Japan Drone 2021にみちびき展示ブースを出展
-
 2020年11月10日
2020年11月10日[告知] G空間EXPO 2020で「みちびき講演会」を開催
-
 2020年11月30日
2020年11月30日G空間EXPO 2020に特設Webサイト「みちびきショーケース」を開設
-
 2020年12月07日
2020年12月07日G空間EXPO2020「みちびき講演会」の録画映像
-
 2020年11月05日
2020年11月05日[報告] SATEX 2020に出展
-
 2020年11月19日
2020年11月19日[報告] SATEXでみちびきの高精度測位に関するセミナーを実施
-
 2020年09月28日
2020年09月28日[告知] GPS・QZSSロボットカーコンテスト、今年はリモートで開催
-
 2020年11月16日
2020年11月16日[報告] GPS・QZSSロボットカーコンテスト2020をリモートで開催
-
 2020年02月06日
2020年02月06日[報告] IMO第7回NCSR小委員会でQZSSに関わる審議を実施
-
 2019年12月23日
2019年12月23日[報告] G空間EXPO 2019でみちびき講演会を開催
-
 2019年11月29日
2019年11月29日[展示] みちびき、G空間EXPO 2019にブース出展
-
 2019年10月31日
2019年10月31日[告知] G空間EXPO2019でみちびき講演会を開催
-
 2019年09月24日
2019年09月24日[募集] 第4回宇宙開発利用大賞
-
 2019年09月13日
2019年09月13日[告知] ロボットカーコンテスト2019、11月3日に開催
-
 2019年11月18日
2019年11月18日[報告] GPS・QZSSロボットカーコンテスト2019を開催
-
 2019年10月03日
2019年10月03日[告知] CEATEC 2019、10/15~18に幕張メッセで開催
-
 2019年09月05日
2019年09月05日[告知] SATEX(衛星測位・位置情報展)2019で展示と講演
-
 2019年09月12日
2019年09月12日[報告] 東京ビッグサイト青海展示棟でSATEX 2019を開催
-
 2019年06月13日
2019年06月13日[展示] LBJ2019、幕張メッセで6月14日まで開催
-
 2019年06月20日
2019年06月20日[講演] LBJ2019で位置情報のスポーツへの活用をテーマにした基調講演
-
 2019年06月27日
2019年06月27日[セミナー] NEDOと楽天がLBJ2019でみちびき活用のドローン研究開発を報告
-
 2019年05月23日
2019年05月23日[報告] CLAS対応ドローンの自律飛行制御を活用したピンポイント配送の実証
-
 2019年04月22日
2019年04月22日[報告] S-NET宇宙利用シンポジウムでみちびき利用の活発な議論
-
 2019年04月15日
2019年04月15日[報告] 内閣府と欧州委員会が第4回日欧GNSS官民ラウンドテーブルを開催
-
 2019年03月28日
2019年03月28日[報告] ビワイチRIDEでサイクリングイベント運営者支援システムの実証
-
 2019年03月14日
2019年03月14日[報告] ジャパン・ドローン2019に展示ブース出展
-
 2019年02月07日
2019年02月07日[報告] IMO第6回NCSR小委員会で、みちびきのプレゼンテーションを実施
-
 2018年06月25日
2018年06月25日[告知] 第12回ロボットカーコンテスト、11月11日に開催
-
 2018年12月10日
2018年12月10日[報告] 第12回「GPS・QZSSロボットカーコンテスト2018」開催
-
 2018年11月07日
2018年11月07日[報告] 11月1日、「みちびき」サービス開始記念式典を開催
-
 2018年10月22日
2018年10月22日[告知] 11月のG空間EXPO2018で講演会を開催
-
 2018年11月15日
2018年11月15日[展示] 開催中のG空間EXPO 2018にみちびきブースを出展
-
 2018年12月21日
2018年12月21日[報告] G空間EXPO2018でみちびき講演会を開催
-
 2018年10月09日
2018年10月09日[告知] S-NETセミナー・ワークショップ(大阪・福島・仙台・福岡)の開催
-
 2018年10月04日
2018年10月04日[報告] 埼玉県蓮田市で「Q-ANPI」実証実験を実施
-
 2018年09月25日
2018年09月25日[告知] SATEX(衛星測位・位置情報展)2018で展示協力と講演
-
 2018年09月28日
2018年09月28日[速報] 東京ビッグサイトでSATEX2018が開幕
-
 2018年10月18日
2018年10月18日[報告] SATEX2018で衛星測位や位置情報利用の講演
-
 2018年09月12日
2018年09月12日[告知] メルボルンで第10回マルチGNSSアジアカンファレンスを開催
-
 2018年03月31日
2018年03月31日[報告] 「立教小学校 情報科」授業見学レポート(2017年度)
-
 2017年04月06日
2017年04月06日[報告] 「立教小学校 情報科」授業見学レポート(2016年度)
-
 2016年03月24日
2016年03月24日[報告] 「立教小学校 情報科」授業見学レポート(2015年度)
-
 2015年02月23日
2015年02月23日[報告] 「立教小学校 情報科」授業見学レポート(2014年度)
-
 2017年12月05日
2017年12月05日[報告] 京都でみちびきを利用した自脱コンバイン(イネ収穫機)の自動走行実験
-
 2017年11月16日
2017年11月16日[報告] 和歌山県と高知県で、世界初のQ-ANPI実証実験を実施
-
 2017年11月10日
2017年11月10日[告知] 「組込み総合技術展」にみちびきブースを出展
-
 2017年11月17日
2017年11月17日[報告] 「組込み総合技術展」にみちびきブースを出展
-
 2017年10月30日
2017年10月30日[報告] 北海道でみちびきを利用した農業用トラクターの自動走行実験を実施
-
 2017年09月25日
2017年09月25日[告知] G空間EXPO2017で講演会「みちびきGO!GO!GO!GO!」を開催
-
 2017年10月17日
2017年10月17日[報告] G空間EXPO2017で準天頂衛星システム講演会を開催
-
 2017年10月13日
2017年10月13日[展示] みちびき、G空間EXPO 2017にブース出展
-
 2017年10月16日
2017年10月16日[展示] G空間EXPO 2017における測位関連展示
-
 2017年08月30日
2017年08月30日[報告] 三菱重工業、みちびき4号機打ち上げロケットのコア機体を公開
-
 2017年08月09日
2017年08月09日[報告] みちびき4号機の機体を公開しました
-
 2017年07月24日
2017年07月24日[告知] みちびき3号機打ち上げライブ中継
-
 2017年06月28日
2017年06月28日[報告] 三菱重工業、みちびき3号機の打上げロケットを公開
-
 2017年06月16日
2017年06月16日[報告] みちびき3号機の機体を公開
-
 2017年06月05日
2017年06月05日[告知] ロケーションビジネスジャパン2017に出展します
-
 2017年06月07日
2017年06月07日[展示] LBJ2017、6月9日まで幕張メッセで開催中
-
 2017年06月22日
2017年06月22日[講演] LBJ2017で位置情報に関するスポーツとビジネスの講演
-
 2017年06月01日
2017年06月01日[報告] みちびき2号機の打ち上げに成功
-
 2017年05月26日
2017年05月26日[告知] みちびき2号機打ち上げライブ中継
-
 2017年04月25日
2017年04月25日[報告] 三菱重工業、みちびき2号機打上げロケットのコア機体を公開
-
 2017年04月07日
2017年04月07日[報告] みちびき2号機の機体公開を行いました
-
 2017年03月10日
2017年03月10日[告知] 今年度の締めくくりとなるS-NET大会を3月21日に開催します
-
 2017年04月23日
2017年04月23日[報告] スペース・ニューエコノミー創造ネットワーク(S-NET)大会
-
 2017年02月10日
2017年02月10日[告知] 3月のみちびきペーパークラフト教室は、つくばで開催
-
 2017年03月10日
2017年03月10日[報告] 第6回ペーパークラフト教室をつくばエキスポセンターで開催
-
 2017年02月08日
2017年02月08日[告知] 市川市で2月25日、みちびきペーパークラフト教室を開催
-
 2017年03月03日
2017年03月03日[報告] 第5回ペーパークラフト教室を千葉県立現代産業科学館で開催
-
 2017年02月16日
2017年02月16日[告知] S-NET第5回分科会を2月24日、沖縄で開催
-
 2017年04月29日
2017年04月29日[報告] S-NET第5回分科会(沖縄)
-
 2017年02月02日
2017年02月02日[告知] S-NET第4回分科会を2月15日、駐日欧州連合代表部で開催
-
 2017年04月29日
2017年04月29日[報告] S-NET第4回分科会(駐日EU代表部)
-
 2017年01月25日
2017年01月25日[告知] S-NET第3回分科会を1月31日、東京で開催
-
 2017年03月13日
2017年03月13日[報告] S-NET第3回分科会(東京:宇宙×農業)
-
 2016年12月28日
2016年12月28日[告知] S-NET第2回分科会を1月19日、和歌山で開催
-
 2017年02月27日
2017年02月27日[報告] S-NET第2回分科会(和歌山)
-
 2016年12月13日
2016年12月13日[告知] 1月15日、東京・五反田でみちびきペーパークラフト教室
-
 2017年01月19日
2017年01月19日[報告] 第4回ペーパークラフト教室を五反田文化センターで開催
-
 2016年12月03日
2016年12月03日[告知] S-NET第1回分科会を12月21日、熊本で開催
-
 2017年02月15日
2017年02月15日[報告] S-NET第1回分科会(熊本)
-
 2016年11月28日
2016年11月28日[報告] 「世界津波の日」に合わせ和歌山県でQ-ANPI実証実験
-
 2016年11月11日
2016年11月11日[告知]-1 G空間EXPO2016で講演会「みちびきGO」を開催
-
 2016年11月05日
2016年11月05日[告知2] 日本科学未来館で11月26日、みちびきペーパークラフト教室
-
 2016年11月25日
2016年11月25日[展示]-1 G空間EXPO 2016、日本科学未来館で開催
-
 2016年11月30日
2016年11月30日[展示]-2 G空間EXPO 2016における測位関連展示
-
 2016年12月14日
2016年12月14日[報告] 準天頂衛星システム講演会「みちびきGO」
-
 2016年12月02日
2016年12月02日[報告] 第3回ペーパークラフト教室を日本科学未来館で開催
-
 2016年10月04日
2016年10月04日[告知] 10月29日、群馬・館林市でみちびきペーパークラフト教室
-
 2016年11月02日
2016年11月02日[報告] 第2回ペーパークラフト教室を群馬・館林市で開催
-
 2016年09月07日
2016年09月07日[告知] 11月に第8回マルチGNSSアジアカンファレンスを開催
-
 2016年08月13日
2016年08月13日[告知] 9月19日に日本科学未来館で小学生向けみちびき体験イベント
-
 2016年09月20日
2016年09月20日[速報] 日本科学未来館でクレイアニメを制作するみちびき体験イベント
-
 2016年09月29日
2016年09月29日[報告] 粘土のみちびきでアニメ制作体験
-
 2016年08月10日
2016年08月10日[告知] 8月24日、横浜市でみちびきペーパークラフト教室を開催
-
 2016年08月30日
2016年08月30日[速報] 第1回ペーパークラフト教室を横浜市の科学館で開催
-
 2016年09月06日
2016年09月06日[報告] 第1回ペーパークラフト教室を横浜市の科学館で開催
-
 2016年07月08日
2016年07月08日[報告] 和歌山県海南市でQ-ANPI実証実験を実施
-
 2016年06月06日
2016年06月06日[LBJ告知] ロケーションビジネスジャパン2016に出展します
-
 2016年06月09日
2016年06月09日[LBJ展示] 6月10日まで幕張メッセで開催中
-
 2016年06月20日
2016年06月20日[LBJ講演] スポーツ分野でのロケーションテクノロジー(筑波大・古川氏/慶應大・神武氏)
-
 2016年06月22日
2016年06月22日[LBJ講演] みちびきによる観光実証実験結果を報告(NEC村井氏)
-
 2016年05月16日
2016年05月16日[WTP告知] ワイヤレス・テクノロジー・パーク2016に出展します
-
 2016年05月25日
2016年05月25日[WTP展示] 東京ビッグサイトで5月27日まで開催中
-
 2016年06月10日
2016年06月10日[WTP講演](1)マルチGNSSによる測位性能向上に期待(東京海洋大・久保氏)
-
 2016年06月13日
2016年06月13日[WTP講演](2)4機体制に向け利活用の議論を推進したい(内閣府・坂部氏)
-
 2016年06月15日
2016年06月15日[WTP講演](3)防災・農業・観光などの利用実証を多数実施(SPAC松岡氏)
-
 2016年07月12日
2016年07月12日[WTP講演](4)Tokyo2020に向けた位置情報の貢献(東京大・柴崎氏)
-
 2016年04月01日
2016年04月01日[告知] European Space Solutions2016 事前説明会のご案内
-
 2016年03月25日
2016年03月25日[速報] ジャパン・ドローン2016開催中
-
 2016年03月17日
2016年03月17日[告知] ジャパン・ドローン2016に出展します
-
 2016年03月26日
2016年03月26日[報告] 第1回宇宙×G空間ワークショップ(和歌山)初日
-
 2016年03月29日
2016年03月29日[報告] 第1回宇宙×G空間ワークショップ(和歌山)2日目
-
 2016年02月26日
2016年02月26日[告知] 宇宙×G空間ワークショップ、3月4日に福岡で開催
-
 2016年04月14日
2016年04月14日[報告] 第2回宇宙×G空間ワークショップ(福岡)
-
 2016年04月15日
2016年04月15日[報告] 第3回宇宙×G空間ワークショップ(東京)
-
 2015年10月23日
2015年10月23日[告知] スペース・ニューエコノミー創造ネットワーク(S-NET)を立ち上げます
-
 2015年11月13日
2015年11月13日[報告] S-NET準備会合(東京エリア)
-
 2015年11月23日
2015年11月23日[報告] S-NET準備会合(京都エリア)
-
 2016年01月20日
2016年01月20日[告知] S-NET準備会合を1月26日に名古屋で開催
-
 2016年02月15日
2016年02月15日[報告] S-NET準備会合(名古屋)
-
 2016年02月01日
2016年02月01日[告知] S-NET準備会合、沖縄公開WSを2月17日に開催
-
 2016年03月02日
2016年03月02日[報告] S-NET準備会合(沖縄)
-
 2016年03月01日
2016年03月01日[告知] 3月22日、第2回宇宙開発利用大賞表彰式・S-NETローンチイベント
-
 2016年04月08日
2016年04月08日[報告] 第2回宇宙開発利用大賞表彰式・S-NETローンチイベント
-
 2016年02月04日
2016年02月04日[告知] PS-QZSS及びIS-QZSS(センチメータ級測位補強サービス編)へご意見、ご質問の募集
-
 2016年03月03日
2016年03月03日[報告] PS-QZSS及びIS-QZSS説明会(センチメータ級測位補強サービス編)
-
 2016年02月04日
2016年02月04日[告知] PS-QZSS及びIS-QZSS説明会(センチメータ級測位補強サービス編)
-
 2016年01月22日
2016年01月22日[お知らせ] 準天頂衛星システム利用者会(QSUS)の再編について
-
 2016年02月05日
2016年02月05日[お知らせ] QSUS再編に伴う「みちびきメール」の配信について
-
 2016年01月14日
2016年01月14日[報告] 横須賀市でみちびきを活用した防災実験
-
 2015年10月26日
2015年10月26日[報告] GPS・QZSSロボットカーコンテスト2015
-
 2015年09月28日
2015年09月28日[告知-1] 第4回準天頂衛星シンポジウムを11月に京都で開催
-
 2015年10月22日
2015年10月22日[告知-2] 11月17日、京都で第4回準天頂衛星シンポジウム
-
 2015年12月18日
2015年12月18日[報告] 第4回準天頂衛星シンポジウム
-
 2015年12月26日
2015年12月26日[報告] 京都で外国人観光客を対象にバスロケ利用実証
-
 2015年10月14日
2015年10月14日[速報] 10月16日まで次世代農業EXPOに出展中
-
 2015年10月08日
2015年10月08日[速報] 幕張メッセでシーテックジャパン2015開催中
-
 2015年10月03日
2015年10月03日[報告] 人吉市で衛星安否確認サービスを活用した防災訓練
-
 2015年09月09日
2015年09月09日[告知] 12月に開かれる第7回マルチGNSSアジアカンファレンス
-
 2015年09月08日
2015年09月08日[お知らせ] ASCII.jpにみちびき×「花咲くいろは」コラボツアーの紹介記事
-
 2015年09月06日
2015年09月06日[告知] G空間EXPO2015に出展します
-
 2015年10月29日
2015年10月29日[告知] G空間EXPO2015 講演会と展示のご案内
-
 2015年12月01日
2015年12月01日[報告] G空間EXPO2015の華やかな展示風景
-
 2015年12月09日
2015年12月09日[報告] 測位精度の効果を触って確認。みちびき新型模型がお披露目
-
 2015年12月15日
2015年12月15日[報告] G空間EXPOでみちびきの展望を語る講演会
-
 2015年08月03日
2015年08月03日[告知] みちびきを使用した北陸エリアにおける実証実験ツアーの実施について
-
 2015年07月07日
2015年07月07日[告知] PS-QZSS及びIS-QZSS説明会(サブメータ級測位補強サービス編)
-
 2015年06月02日
2015年06月02日[告知] ロケーションビジネスジャパン2015に出展します
-
 2015年06月19日
2015年06月19日[セミナー1] LBJ2015で自動走行システムに向けた測量・法律の課題整理
-
 2015年06月19日
2015年06月19日[セミナー2] LBJ2015でみちびきを活用したビジネス展開を議論
-
 2015年06月30日
2015年06月30日[展示ブース] LBJ2015で模型やパネル、映像を紹介
-
 2015年05月27日
2015年05月27日[速報] WTP2015、東京ビッグサイトで開催中
-
 2015年05月26日
2015年05月26日[告知] ワイヤレス・テクノロジー・パーク2015に出展します
-
 2015年04月30日
2015年04月30日[告知] バリシップ2015/WTP2015/LBJ2015に出展します
-
 2015年03月30日
2015年03月30日[報告] 全国「山の日」フォーラムに出展しました
-
 2015年03月30日
2015年03月30日[報告] 第3回QSUS発表会(QZSS産学官利用拡大プラットフォーム会議)・懇親会
-
 2015年03月09日
2015年03月09日[報告] 箱根エリアで観光をキーワードとした実証実験を実施
-
 2015年03月06日
2015年03月06日[告知] 箱根エリアで観光をキーワードとした実証実験を実施
-
 2015年02月18日
2015年02月18日[告知] 第3回QSUS発表会(QZSS産学官利用拡大プラットフォーム会議)・懇親会
-
 2014年11月27日
2014年11月27日[告知] 第2回QSUS発表会・懇親会
-
 2014年12月16日
2014年12月16日[報告] 第2回QSUS発表会・懇親会
-
 2014年12月04日
2014年12月04日ロボットカーコンテスト2014:早稲田大 天野研究室インタビュー
-
 2014年11月11日
2014年11月11日ロボットカーコンテスト2014:電気通信大 ロボメカ工房インタビュー(3)
-
 2014年10月16日
2014年10月16日ロボットカーコンテスト2014:埼玉県立大宮工業高校インタビュー(2)
-
 2014年09月24日
2014年09月24日ロボットカーコンテスト2014:電気通信大 ロボメカ工房インタビュー(2)
-
 2014年09月16日
2014年09月16日ロボットカーコンテスト2014:埼玉県立大宮工業高校インタビュー(1)
-
 2014年09月08日
2014年09月08日ロボットカーコンテスト2014:電気通信大 ロボメカ工房インタビュー(1)
-
 2014年11月20日
2014年11月20日ロボットカーコンテスト2014:G空間EXPO2014デモ走行
-
 2014年10月29日
2014年10月29日ロボットカーコンテスト2014:競技結果
-
 2014年09月08日
2014年09月08日ロボットカーコンテスト2014:インタビュー
-
 2014年07月29日
2014年07月29日[告知] ロボットカーコンテスト2014
-
 2014年12月05日
2014年12月05日G空間EXPO 2014:自動販売機連携デモ
-
 2014年12月05日
2014年12月05日G空間EXPO 2014:講演会レポート
-
 2014年11月21日
2014年11月21日G空間EXPO 2014:結果報告
-
 2014年11月10日
2014年11月10日G空間EXPO 2014:出展告知
-
 2014年10月08日
2014年10月08日第3回準天頂衛星シンポジウム[開催告知]
-
 2014年11月05日
2014年11月05日第3回準天頂衛星シンポジウム[速報]
-
 2014年11月21日
2014年11月21日第3回準天頂衛星シンポジウム[開催レポート]
-
 2014年09月25日
2014年09月25日[告知] QSUS発表会・懇親会
-
 2014年10月09日
2014年10月09日[報告] QSUS発表会・懇親会
-
 2014年09月19日
2014年09月19日PS-QZSS及びIS-QZSS説明会(2014年10月)のご案内
-
 2014年12月11日
2014年12月11日防災利用実証(2014年9月):結果
-
 2014年10月20日
2014年10月20日防災利用実証(2014年9月):開催レポート
-
 2014年09月10日
2014年09月10日第2回準天頂衛星利用拡大アイデアソン開催レポート
-
 2014年09月03日
2014年09月03日第2回準天頂衛星シンポジウム:開催レポート
-
 2014年05月07日
2014年05月07日[告知] 準天頂衛星アプリコンテスト2014
-
 2014年05月07日
2014年05月07日[告知] 準天頂衛星アプリコンテスト2014:応募規約
-
 2014年06月06日
2014年06月06日[報告] 準天頂衛星アプリコンテスト2014:出展作品
-
 2014年07月24日
2014年07月24日[報告] 準天頂衛星アプリコンテスト2014:審査結果
-
 2014年02月12日
2014年02月12日準天頂衛星シンポジウム:開催レポート
-
 2013年12月10日
2013年12月10日準天頂衛星利用拡大アイデアソン:開催レポート
