






ロボットカーコンテスト2014:競技結果
競技結果
「第8回GPS・QZSSロボットカーコンテスト2014」は、衛星測位しながら自律走行するロボットカーのコンテストです。主な参加者は学生や研究者で、次世代の技術者の育成や、相互交流も目的の一つです。
2014年10月18日(土)に東京海洋大学 越中島キャンパス第二グラウンドにて、新競技「QZSSスクランブル」と、従来からの競技「ダブルパイロンレース」を実施しました。結果を発表いたします。
| 10月18日(土)の天気 | 晴れ | |
|---|---|---|
| グラウンド状態 | 良 | |
| 受付台数 | QZSSスクランブル | 6台 |
| ダブルパイロンレース | 15台 | |
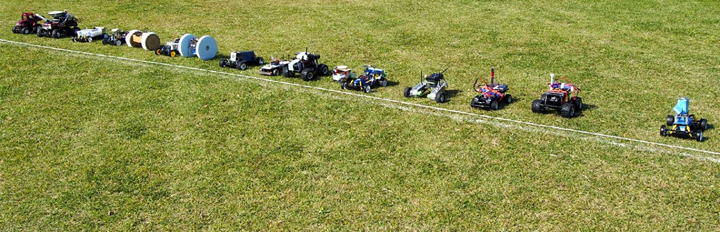
出場したロボットカー
QZSSスクランブル
<ルール>
・今回大会からの新競技
・準天頂衛星からの災危通報でターゲットユニットが3つ指定される
・ロボットカーは災危通報を受信してからスタートを切り、衛星測位しながらターゲットユニットを順番に通り、3つ目に到着した時間の短さを競う(競技時間は3分)
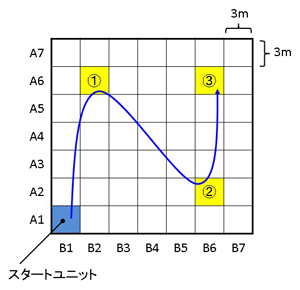
競技場
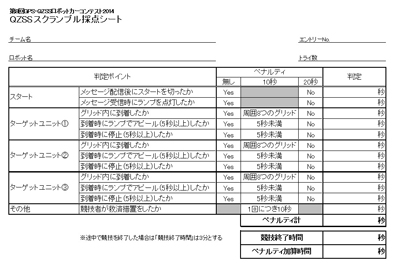
採点シート
<受付台数>
6台
<結果>
| 順位 | ロボット名(チーム名) | 競技時間 (ペナルティ含む) |
|
|---|---|---|---|
| 優勝 |  |
Kevin(Amano Lab.) 高性能な車体と処理部をベースとして、高精度測位と効率的な走行アルゴリズムにより、59秒という驚異的なタイムを記録。まったく無駄のない圧倒的な走りで優勝。 |
59秒 |
| 準優勝 | 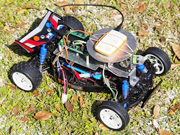 |
阿蘇不知火5号(熊本高専熊本C 葉山研究室) 2011年大会のダブルパイロンレースで優勝経験を持つチーム。準天頂衛星からの災危通報でスタートを切ったが、座標の入力ミスにより目的地に到達できず。 |
360秒 |
| 準優勝 |  |
ロボット・インフィニティ(個人参加) 手作り車体での出場。準天頂衛星からの災危通報でスタートを切ったが、小さな車輪ゆえ芝に足を取られてまっすぐ進まず。最年少小学4年生がオペレーター。 |
360秒 |
| 他、3台 | |||
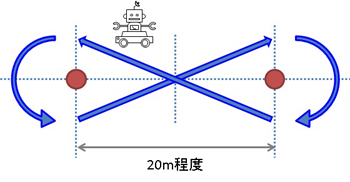
ダブルパイロンレース
<ルール>
・従来からの競技
・約20m離れた2つのコーンを衛星測位しながら∞型に周回する
・周回したことにより得られるポイントを競う(競技時間は3分)
競技場
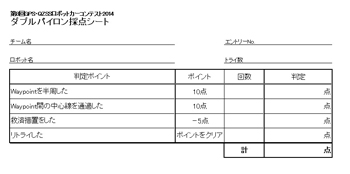
採点シート
<受付台数>
15台
<結果>
| 順位 | ロボット名(チーム名) | ポイント | |
|---|---|---|---|
| 優勝 | |
Kevin(Amano Lab.) [初] 高精度測位を活用して正確にコーンを∞字に走行。初出場とは思えない他を圧倒する走りを披露。QZSSスクランブルとのダブル優勝を達成。 |
95ポイント |
| 準優勝 |  |
Luchs(電気通信大学ロボメカ工房) [初] 準天頂衛星からの信号を受信できる受信モジュールを搭載。1秒間に5回の高速測位をしながら走行。初出場ながら4周周回し80ポイントと高得点を獲得。 |
80ポイント |
| 第3位 | |
阿蘇不知火5号(熊本高専熊本C 葉山研究室) 毎回出場している常連チーム。今回は準天頂衛星からの信号を受信できる「QZPOD」で測位しながら走行。5回連続の入賞。 |
20ポイント |
| 第3位 |  |
荒炎車β(有明高専岩本研究室) [初] 福岡県大牟田市からの初出場チーム。学習用プラットフォームにGPSモジュールを接続して走行制御。荒炎車αと2台出場し、オフロード車の荒炎車βが3位入賞。 |
20ポイント |
| 他、11台 | |||
アルバム

大会前日の測量

参加者と会場の様子

出走前の競技者へのインタビュー

準天頂衛星からのL1-SAIF信号(災危通報含む)を受信する受信機(QZPOD)

表彰式
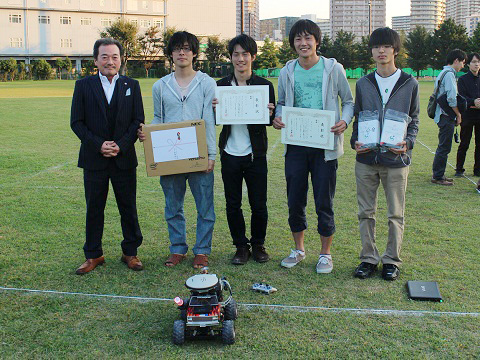
優勝チームにはアイサンテクノロジー株式会社(左は社長)から特別賞(PC)が贈呈されました。
-
 2023年11月29日
2023年11月29日[告知] ILS 2023でみちびきスタートアップピッチを開催
-
 2024年01月15日
2024年01月15日[報告] ILS 2023でピッチやブース展示を実施
-
 2023年11月22日
2023年11月22日[報告] 国土交通省性能評価センターの一般公開でみちびきや地上局アンテナを紹介
-
 2023年10月19日
2023年10月19日[告知]「第6回宇宙開発利用大賞」募集開始のご案内
-
 2023年10月16日
2023年10月16日[告知] 11/9開催、みちびきアイデアソンの参加者募集中
-
 2023年12月27日
2023年12月27日[報告] みちびきアイデアソンを開催
-
 2023年10月06日
2023年10月06日[告知] 今年もロボットカーコンテストを10/22に開催
-
 2023年11月27日
2023年11月27日[報告] GNSS・QZSSロボットカーコンテスト2023を開催
-
 2023年10月04日
2023年10月04日[告知] CEATEC 2023、10/17~20に幕張メッセで開催
-
 2023年10月18日
2023年10月18日[速報] CEATEC 2023を幕張メッセで開催
-
 2023年11月13日
2023年11月13日[報告] CEATEC 2023でみちびきに関する講演
-
 2023年10月24日
2023年10月24日[告知]「G空間EXPO 2023」ウェビナー及び出展のご案内
-
 2023年11月13日
2023年11月13日「みちびきウェビナー ~みちびき利活用最前線 in G空間EXPO 2023~」アーカイブ配信
-
 2023年12月11日
2023年12月11日[報告] みちびき、G空間EXPO 2023に出展
-
 2023年12月18日
2023年12月18日[報告]「みちびきウェビナー2023」を開催しました
-
 2023年10月02日
2023年10月02日[告知] 10/11-13のスマート農業EXPOにみちびきブースを出展
-
 2023年11月02日
2023年11月02日[報告] スマート農業EXPOにみちびきブースを出展
-
 2023年09月11日
2023年09月11日[告知] 9/29に佐世保の海洋DXカンファレンスで内閣府が基調講演
-
 2023年08月31日
2023年08月31日[告知] 9/7-8に長崎で開催されるドローンサミットに内閣府も参加
-
 2023年10月05日
2023年10月05日[報告] 長崎のドローンサミットでみちびき対応ドローンのデモや講演を実施
-
 2023年08月08日
2023年08月08日[告知] 9/1-2 福島ロボテスフェスタでみちびき展示・デモ・講演を実施
-
 2023年09月29日
2023年09月29日[報告] ロボテスフェスタでみちびき対応機器のデモや講演会を実施
-
 2023年08月02日
2023年08月02日[告知] 自動車技術会が9/13にみちびき講演会を開催します
-
 2023年10月11日
2023年10月11日[報告] 自動車技術会関東支部と共催で「みちびき講演会」を開催
-
 2023年06月27日
2023年06月27日[告知] 7/20に「みちびき講演会2023 in 北海道」を開催します
-
 2023年09月04日
2023年09月04日[報告] 札幌にて「みちびき講演会2023 in 北海道」を開催
-
 2023年05月15日
2023年05月15日「みちびきコミュニティ」2022年度活動報告を公開しました
-
 2023年04月05日
2023年04月05日[告知] 4/6に都内でみちびきのサービス開発の可能性探るセッション開催
-
 2023年04月24日
2023年04月24日[報告] ベンチャーカフェ東京でみちびきを紹介するピッチを開催
-
 2023年02月21日
2023年02月21日[告知] 内閣府とQSSが2/27-28開催のCity-Tech.Tokyoに出展
-
 2023年02月27日
2023年02月27日[報告] City-Tech.Tokyoに内閣府とQSSが参加
-
 2022年11月17日
2022年11月17日[告知]「G空間EXPO 2022」ウェビナー及び出展のご案内
-
 2022年12月19日
2022年12月19日[報告] みちびき、G空間EXPO 2022に出展
-
 2023年01月25日
2023年01月25日[報告] みちびきウェビナーを開催しました
-
 2022年12月12日
2022年12月12日「みちびきウェビナー ~みちびき利活用最前線 in G空間EXPO 2022~」アーカイブ配信
-
 2022年11月14日
2022年11月14日[告知] 第10回ILSで11/29、みちびきスタートアップピッチを開催
-
 2022年12月05日
2022年12月05日[報告] 第10回ILSでスタートアップピッチやブース展示を実施
-
 2022年10月18日
2022年10月18日[告知] ロボットカーコンテスト2022を10月22日に開催
-
 2022年11月07日
2022年11月07日[報告] GNSS・QZSSロボットカーコンテスト2022を開催
-
 2022年09月12日
2022年09月12日[告知] 9/28-30の衛星測位・位置情報展(SATEX)に出展
-
 2022年10月24日
2022年10月24日[報告] SATEXへブース出展し、みちびき活用事例・製品紹介のセミナーを開催
-
 2022年08月25日
2022年08月25日[告知] 9月の福島・ロボテスEXPOでみちびきの展示・デモ・講演を実施
-
 2022年10月31日
2022年10月31日[報告] ロボテスEXPOでみちびき対応ドローンやUGVデモ、講演会を実施
-
 2022年07月01日
2022年07月01日[告知] 琵琶湖のトライアスロン大会でSLASを活用した実証実験
-
 2022年08月19日
2022年08月19日[報告] 琵琶湖のトライアスロン大会でSLASを活用した実証実験を実施
-
 2022年06月03日
2022年06月03日[告知] Japan Drone 2022(6/21-23)に出展します
-
 2022年06月21日
2022年06月21日[報告] Japan Drone 2022にみちびき展示ブースを出展
-
 2022年02月14日
2022年02月14日[報告] SATEXでみちびきの高精度測位に関するセミナーを実施
-
 2022年02月02日
2022年02月02日[報告] 衛星測位・位置情報展(SATEX)に出展
-
 2021年11月01日
2021年11月01日[告知] 日欧GNSS官民ラウンドテーブルを11/25-26に開催
-
 2021年12月15日
2021年12月15日[報告] 第5回日欧GNSS官民ラウンドテーブルを開催
-
 2021年12月06日
2021年12月06日[告知] G空間EXPO 2021にブース出展
-
 2021年12月07日
2021年12月07日[報告] みちびき、G空間EXPO 2021にブース出展
-
 2021年11月22日
2021年11月22日[告知] 今年2回目のみちびきウェビナーを12/10に開催
-
 2021年12月24日
2021年12月24日[報告] 今年2回目のみちびきウェビナーを開催しました
-
 2021年11月29日
2021年11月29日[報告] GNSS・QZSSロボットカーコンテストをリモート開催
-
 2021年10月26日
2021年10月26日[報告] みちびき(準天頂衛星システム)ウェビナーを開催しました
-
 2021年09月21日
2021年09月21日[告知]「みちびき(準天頂衛星システム)ウェビナー」を開催
-
 2021年09月17日
2021年09月17日[報告] みちびき利用ハッカソン「RPD Challenge 2020」を開催
-
 2021年07月14日
2021年07月14日[告知] 7月15~28日の「Society 5.0科学博」でみちびき関連展示
-
 2021年06月07日
2021年06月07日[告知] 6月14~16日開催の「Japan Drone 2021」に出展します
-
 2021年06月14日
2021年06月14日[報告] Japan Drone 2021にみちびき展示ブースを出展
-
 2020年11月10日
2020年11月10日[告知] G空間EXPO 2020で「みちびき講演会」を開催
-
 2020年11月30日
2020年11月30日G空間EXPO 2020に特設Webサイト「みちびきショーケース」を開設
-
 2020年12月07日
2020年12月07日「みちびき講演会」の録画映像を公開中
-
 2020年11月05日
2020年11月05日[報告] SATEX 2020に出展
-
 2020年11月19日
2020年11月19日[報告] SATEXでみちびきの高精度測位に関するセミナーを実施
-
 2020年09月28日
2020年09月28日[告知] GPS・QZSSロボットカーコンテスト、今年はリモートで開催
-
 2020年11月16日
2020年11月16日[報告] GPS・QZSSロボットカーコンテスト2020をリモートで開催
-
 2020年02月06日
2020年02月06日[報告] IMO第7回NCSR小委員会でQZSSに関わる審議を実施
-
 2019年12月23日
2019年12月23日[報告] G空間EXPO 2019でみちびき講演会を開催
-
 2019年11月29日
2019年11月29日[展示] みちびき、G空間EXPO 2019にブース出展
-
 2019年10月31日
2019年10月31日[告知] G空間EXPO2019でみちびき講演会を開催
-
 2019年09月24日
2019年09月24日[募集] 第4回宇宙開発利用大賞
-
 2019年09月13日
2019年09月13日[告知] ロボットカーコンテスト2019、11月3日に開催
-
 2019年11月18日
2019年11月18日[報告] GPS・QZSSロボットカーコンテスト2019を開催
-
 2019年10月03日
2019年10月03日[告知] CEATEC 2019、10/15~18に幕張メッセで開催
-
 2019年09月05日
2019年09月05日[告知] SATEX(衛星測位・位置情報展)2019で展示と講演
-
 2019年09月12日
2019年09月12日[報告] 東京ビッグサイト青海展示棟でSATEX 2019を開催
-
 2019年06月13日
2019年06月13日[展示] LBJ2019、幕張メッセで6月14日まで開催
-
 2019年06月20日
2019年06月20日[講演] LBJ2019で位置情報のスポーツへの活用をテーマにした基調講演
-
 2019年06月27日
2019年06月27日[セミナー] NEDOと楽天がLBJ2019でみちびき活用のドローン研究開発を報告
-
 2019年05月23日
2019年05月23日[ニュースリリース] 準天頂衛星システム「みちびき」を活用したドローン実証実験の実施について
-
 2019年04月22日
2019年04月22日[報告] S-NET宇宙利用シンポジウムでみちびき利用の活発な議論
-
 2019年04月15日
2019年04月15日[報告] 内閣府と欧州委員会が第4回日欧GNSS官民ラウンドテーブルを開催
-
 2019年03月28日
2019年03月28日[報告] ビワイチRIDEでサイクリングイベント運営者支援システムの実証
-
 2019年03月14日
2019年03月14日[報告] ジャパン・ドローン2019に展示ブース出展
-
 2019年02月07日
2019年02月07日[報告] IMO第6回NCSR小委員会で、みちびきのプレゼンテーションを実施
-
 2018年06月25日
2018年06月25日[告知] 第12回ロボットカーコンテスト、11月11日に開催
-
 2018年12月10日
2018年12月10日[報告] 第12回「GPS・QZSSロボットカーコンテスト2018」開催
-
 2018年11月07日
2018年11月07日[報告] 11月1日、「みちびき」サービス開始記念式典を開催
-
 2018年10月22日
2018年10月22日[告知] 11月のG空間EXPO2018で講演会を開催
-
 2018年11月15日
2018年11月15日[展示] 開催中のG空間EXPO 2018にみちびきブースを出展
-
 2018年12月21日
2018年12月21日[報告] G空間EXPO2018でみちびき講演会を開催
-
 2018年10月09日
2018年10月09日[告知] S-NETセミナー・ワークショップ(大阪・福島・仙台・福岡)の開催
-
 2018年10月04日
2018年10月04日[報告] 埼玉県蓮田市で「Q-ANPI」実証実験を実施
-
 2018年09月25日
2018年09月25日[告知] SATEX(衛星測位・位置情報展)2018で展示協力と講演
-
 2018年09月28日
2018年09月28日[速報] 東京ビッグサイトでSATEX2018が開幕
-
 2018年10月18日
2018年10月18日[報告] SATEX2018で衛星測位や位置情報利用の講演
-
 2018年09月12日
2018年09月12日[告知] メルボルンで第10回マルチGNSSアジアカンファレンスを開催
-
 2018年03月31日
2018年03月31日[報告] 「立教小学校 情報科」授業見学レポート(2017年度)
-
 2017年04月06日
2017年04月06日[報告] 「立教小学校 情報科」授業見学レポート(2016年度)
-
 2016年03月24日
2016年03月24日[報告] 「立教小学校 情報科」授業見学レポート(2015年度)
-
 2015年02月23日
2015年02月23日[報告] 「立教小学校 情報科」授業見学レポート(2014年度)
-
 2017年12月05日
2017年12月05日[報告] 京都でみちびきを利用した自脱コンバイン(イネ収穫機)の自動走行実験
-
 2017年11月16日
2017年11月16日[報告] 和歌山県と高知県で、世界初のQ-ANPI実証実験を実施
-
 2017年11月10日
2017年11月10日[告知] 「組込み総合技術展」にみちびきブースを出展
-
 2017年11月17日
2017年11月17日[報告] 「組込み総合技術展」にみちびきブースを出展
-
 2017年10月30日
2017年10月30日[報告] 北海道でみちびきを利用した農業用トラクターの自動走行実験を実施
-
 2017年09月25日
2017年09月25日[告知] G空間EXPO2017で講演会「みちびきGO!GO!GO!GO!」を開催
-
 2017年10月17日
2017年10月17日[報告] G空間EXPO2017で準天頂衛星システム講演会を開催
-
 2017年10月13日
2017年10月13日[展示] みちびき、G空間EXPO 2017にブース出展
-
 2017年10月16日
2017年10月16日[展示] G空間EXPO 2017における測位関連展示
-
 2017年08月30日
2017年08月30日[報告] 三菱重工業、みちびき4号機打ち上げロケットのコア機体を公開
-
 2017年08月09日
2017年08月09日[報告] みちびき4号機の機体を公開しました
-
 2017年07月24日
2017年07月24日[告知] みちびき3号機打ち上げライブ中継
-
 2017年06月28日
2017年06月28日[報告] 三菱重工業、みちびき3号機の打上げロケットを公開
-
 2017年06月16日
2017年06月16日[報告] みちびき3号機の機体を公開
-
 2017年06月05日
2017年06月05日[告知] ロケーションビジネスジャパン2017に出展します
-
 2017年06月07日
2017年06月07日[展示] LBJ2017、6月9日まで幕張メッセで開催中
-
 2017年06月22日
2017年06月22日[講演] LBJ2017で位置情報に関するスポーツとビジネスの講演
-
 2017年06月01日
2017年06月01日[報告] みちびき2号機の打ち上げに成功
-
 2017年05月26日
2017年05月26日[告知] みちびき2号機打ち上げライブ中継
-
 2017年04月25日
2017年04月25日[報告] 三菱重工業、みちびき2号機打上げロケットのコア機体を公開
-
 2017年04月07日
2017年04月07日[報告] みちびき2号機の機体公開を行いました
-
 2017年03月10日
2017年03月10日[告知] 今年度の締めくくりとなるS-NET大会を3月21日に開催します
-
 2017年04月23日
2017年04月23日[報告] スペース・ニューエコノミー創造ネットワーク(S-NET)大会
-
 2017年02月10日
2017年02月10日[告知] 3月のみちびきペーパークラフト教室は、つくばで開催
-
 2017年03月10日
2017年03月10日[報告] 第6回ペーパークラフト教室をつくばエキスポセンターで開催
-
 2017年02月08日
2017年02月08日[告知] 市川市で2月25日、みちびきペーパークラフト教室を開催
-
 2017年03月03日
2017年03月03日[報告] 第5回ペーパークラフト教室を千葉県立現代産業科学館で開催
-
 2017年02月16日
2017年02月16日[告知] S-NET第5回分科会を2月24日、沖縄で開催
-
 2017年04月29日
2017年04月29日[報告] S-NET第5回分科会(沖縄)
-
 2017年02月02日
2017年02月02日[告知] S-NET第4回分科会を2月15日、駐日欧州連合代表部で開催
-
 2017年04月29日
2017年04月29日[報告] S-NET第4回分科会(駐日EU代表部)
-
 2017年01月25日
2017年01月25日[告知] S-NET第3回分科会を1月31日、東京で開催
-
 2017年03月13日
2017年03月13日[報告] S-NET第3回分科会(東京:宇宙×農業)
-
 2016年12月28日
2016年12月28日[告知] S-NET第2回分科会を1月19日、和歌山で開催
-
 2017年02月27日
2017年02月27日[報告] S-NET第2回分科会(和歌山)
-
 2016年12月13日
2016年12月13日[告知] 1月15日、東京・五反田でみちびきペーパークラフト教室
-
 2017年01月19日
2017年01月19日[報告] 第4回ペーパークラフト教室を五反田文化センターで開催
-
 2016年12月03日
2016年12月03日[告知] S-NET第1回分科会を12月21日、熊本で開催
-
 2017年02月15日
2017年02月15日[報告] S-NET第1回分科会(熊本)
-
 2016年11月28日
2016年11月28日[報告] 「世界津波の日」に合わせ和歌山県でQ-ANPI実証実験
-
 2016年11月11日
2016年11月11日[告知]-1 G空間EXPO2016で講演会「みちびきGO」を開催
-
 2016年11月05日
2016年11月05日[告知2] 日本科学未来館で11月26日、みちびきペーパークラフト教室
-
 2016年11月25日
2016年11月25日[展示]-1 G空間EXPO 2016、日本科学未来館で開催
-
 2016年11月30日
2016年11月30日[展示]-2 G空間EXPO 2016における測位関連展示
-
 2016年12月14日
2016年12月14日[報告] 準天頂衛星システム講演会「みちびきGO」
-
 2016年12月02日
2016年12月02日[報告] 第3回ペーパークラフト教室を日本科学未来館で開催
-
 2016年10月04日
2016年10月04日[告知] 10月29日、群馬・館林市でみちびきペーパークラフト教室
-
 2016年11月02日
2016年11月02日[報告] 第2回ペーパークラフト教室を群馬・館林市で開催
-
 2016年09月07日
2016年09月07日[告知] 11月に第8回マルチGNSSアジアカンファレンスを開催
-
 2016年08月13日
2016年08月13日[告知] 9月19日に日本科学未来館で小学生向けみちびき体験イベント
-
 2016年09月20日
2016年09月20日[速報] 日本科学未来館でクレイアニメを制作するみちびき体験イベント
-
 2016年09月29日
2016年09月29日[報告] 粘土のみちびきでアニメ制作体験
-
 2016年08月10日
2016年08月10日[告知] 8月24日、横浜市でみちびきペーパークラフト教室を開催
-
 2016年08月30日
2016年08月30日[速報] 第1回ペーパークラフト教室を横浜市の科学館で開催
-
 2016年09月06日
2016年09月06日[報告] 第1回ペーパークラフト教室を横浜市の科学館で開催
-
 2016年07月08日
2016年07月08日[報告] 和歌山県海南市でQ-ANPI実証実験を実施
-
 2016年06月06日
2016年06月06日[LBJ告知] ロケーションビジネスジャパン2016に出展します
-
 2016年06月09日
2016年06月09日[LBJ展示] 6月10日まで幕張メッセで開催中
-
 2016年06月20日
2016年06月20日[LBJ講演] スポーツ分野でのロケーションテクノロジー(筑波大・古川氏/慶應大・神武氏)
-
 2016年06月22日
2016年06月22日[LBJ講演] みちびきによる観光実証実験結果を報告(NEC村井氏)
-
 2016年05月16日
2016年05月16日[WTP告知] ワイヤレス・テクノロジー・パーク2016に出展します
-
 2016年05月25日
2016年05月25日[WTP展示] 東京ビッグサイトで5月27日まで開催中
-
 2016年06月10日
2016年06月10日[WTP講演](1)マルチGNSSによる測位性能向上に期待(東京海洋大・久保氏)
-
 2016年06月13日
2016年06月13日[WTP講演](2)4機体制に向け利活用の議論を推進したい(内閣府・坂部氏)
-
 2016年06月15日
2016年06月15日[WTP講演](3)防災・農業・観光などの利用実証を多数実施(SPAC松岡氏)
-
 2016年07月12日
2016年07月12日[WTP講演](4)Tokyo2020に向けた位置情報の貢献(東京大・柴崎氏)
-
 2016年04月01日
2016年04月01日[告知] European Space Solutions2016 事前説明会のご案内
-
 2016年03月25日
2016年03月25日[速報] ジャパン・ドローン2016開催中
-
 2016年03月17日
2016年03月17日[告知] ジャパン・ドローン2016に出展します
-
 2016年03月26日
2016年03月26日[報告] 第1回宇宙×G空間ワークショップ(和歌山)初日
-
 2016年03月29日
2016年03月29日[報告] 第1回宇宙×G空間ワークショップ(和歌山)2日目
-
 2016年02月26日
2016年02月26日[告知] 宇宙×G空間ワークショップ、3月4日に福岡で開催
-
 2016年04月14日
2016年04月14日[報告] 第2回宇宙×G空間ワークショップ(福岡)
-
 2016年04月15日
2016年04月15日[報告] 第3回宇宙×G空間ワークショップ(東京)
-
 2015年10月23日
2015年10月23日[告知] スペース・ニューエコノミー創造ネットワーク(S-NET)を立ち上げます
-
 2015年11月13日
2015年11月13日[報告] S-NET準備会合(東京エリア)
-
 2015年11月23日
2015年11月23日[報告] S-NET準備会合(京都エリア)
-
 2016年01月20日
2016年01月20日[告知] S-NET準備会合を1月26日に名古屋で開催
-
 2016年02月15日
2016年02月15日[報告] S-NET準備会合(名古屋)
-
 2016年02月01日
2016年02月01日[告知] S-NET準備会合、沖縄公開WSを2月17日に開催
-
 2016年03月02日
2016年03月02日[報告] S-NET準備会合(沖縄)
-
 2016年03月01日
2016年03月01日[告知] 3月22日、第2回宇宙開発利用大賞表彰式・S-NETローンチイベント
-
 2016年04月08日
2016年04月08日[報告] 第2回宇宙開発利用大賞表彰式・S-NETローンチイベント
-
 2016年02月04日
2016年02月04日[告知] PS-QZSS及びIS-QZSS(センチメータ級測位補強サービス編)へご意見、ご質問の募集
-
 2016年03月03日
2016年03月03日[報告] PS-QZSS及びIS-QZSS説明会(センチメータ級測位補強サービス編)
-
 2016年02月04日
2016年02月04日[告知] PS-QZSS及びIS-QZSS説明会(センチメータ級測位補強サービス編)
-
 2016年01月22日
2016年01月22日[お知らせ] 準天頂衛星システム利用者会(QSUS)の再編について
-
 2016年02月05日
2016年02月05日[お知らせ] QSUS再編に伴う「みちびきメール」の配信について
-
 2016年01月14日
2016年01月14日[報告] 横須賀市でみちびきを活用した防災実験
-
 2015年10月26日
2015年10月26日[報告] GPS・QZSSロボットカーコンテスト2015
-
 2015年09月28日
2015年09月28日[告知-1] 第4回準天頂衛星シンポジウムを11月に京都で開催
-
 2015年10月22日
2015年10月22日[告知-2] 11月17日、京都で第4回準天頂衛星シンポジウム
-
 2015年12月18日
2015年12月18日[報告] 第4回準天頂衛星シンポジウム
-
 2015年12月26日
2015年12月26日[報告] 京都で外国人観光客を対象にバスロケ利用実証
-
 2015年10月14日
2015年10月14日[速報] 10月16日まで次世代農業EXPOに出展中
-
 2015年10月08日
2015年10月08日[速報] 幕張メッセでシーテックジャパン2015開催中
-
 2015年10月03日
2015年10月03日[報告] 人吉市で衛星安否確認サービスを活用した防災訓練
-
 2015年09月09日
2015年09月09日[告知] 12月に開かれる第7回マルチGNSSアジアカンファレンス
-
 2015年09月08日
2015年09月08日[お知らせ] ASCII.jpにみちびき×「花咲くいろは」コラボツアーの紹介記事
-
 2015年09月06日
2015年09月06日[告知] G空間EXPO2015に出展します
-
 2015年10月29日
2015年10月29日[告知] G空間EXPO2015 講演会と展示のご案内
-
 2015年12月01日
2015年12月01日[報告] G空間EXPO2015の華やかな展示風景
-
 2015年12月09日
2015年12月09日[報告] 測位精度の効果を触って確認。みちびき新型模型がお披露目
-
 2015年12月15日
2015年12月15日[報告] G空間EXPOでみちびきの展望を語る講演会
-
 2015年08月03日
2015年08月03日[告知] みちびきを使用した北陸エリアにおける実証実験ツアーの実施について
-
 2015年07月07日
2015年07月07日[告知] PS-QZSS及びIS-QZSS説明会(サブメータ級測位補強サービス編)
-
 2015年06月02日
2015年06月02日[告知] ロケーションビジネスジャパン2015に出展します
-
 2015年06月19日
2015年06月19日[セミナー1] LBJ2015で自動走行システムに向けた測量・法律の課題整理
-
 2015年06月19日
2015年06月19日[セミナー2] LBJ2015でみちびきを活用したビジネス展開を議論
-
 2015年06月30日
2015年06月30日[展示ブース] LBJ2015で模型やパネル、映像を紹介
-
 2015年05月27日
2015年05月27日[速報] WTP2015、東京ビッグサイトで開催中
-
 2015年05月26日
2015年05月26日[告知] ワイヤレス・テクノロジー・パーク2015に出展します
-
 2015年04月30日
2015年04月30日[告知] バリシップ2015/WTP2015/LBJ2015に出展します
-
 2015年03月30日
2015年03月30日[報告] 全国「山の日」フォーラムに出展しました
-
 2015年03月30日
2015年03月30日[報告] 第3回QSUS発表会(QZSS産学官利用拡大プラットフォーム会議)・懇親会
-
 2015年03月09日
2015年03月09日[報告] 箱根エリアで観光をキーワードとした実証実験を実施
-
 2015年03月06日
2015年03月06日[告知] 箱根エリアで観光をキーワードとした実証実験を実施
-
 2015年02月18日
2015年02月18日[告知] 第3回QSUS発表会(QZSS産学官利用拡大プラットフォーム会議)・懇親会
-
 2014年11月27日
2014年11月27日[告知] 第2回QSUS発表会・懇親会
-
 2014年12月16日
2014年12月16日[報告] 第2回QSUS発表会・懇親会
-
 2014年12月04日
2014年12月04日ロボットカーコンテスト2014:早稲田大 天野研究室インタビュー
-
 2014年11月11日
2014年11月11日ロボットカーコンテスト2014:電気通信大 ロボメカ工房インタビュー(3)
-
 2014年10月16日
2014年10月16日ロボットカーコンテスト2014:埼玉県立大宮工業高校インタビュー(2)
-
 2014年09月24日
2014年09月24日ロボットカーコンテスト2014:電気通信大 ロボメカ工房インタビュー(2)
-
 2014年09月16日
2014年09月16日ロボットカーコンテスト2014:埼玉県立大宮工業高校インタビュー(1)
-
 2014年09月08日
2014年09月08日ロボットカーコンテスト2014:電気通信大 ロボメカ工房インタビュー(1)
-
 2014年11月20日
2014年11月20日ロボットカーコンテスト2014:G空間EXPO2014デモ走行
-
 2014年09月08日
2014年09月08日ロボットカーコンテスト2014:インタビュー
-
 2015年01月15日
2015年01月15日ロボットカーコンテスト2014:大会要項
-
 2014年07月29日
2014年07月29日[告知] ロボットカーコンテスト2014
-
 2014年12月05日
2014年12月05日G空間EXPO 2014:自動販売機連携デモ
-
 2014年12月05日
2014年12月05日G空間EXPO 2014:講演会レポート
-
 2014年11月21日
2014年11月21日G空間EXPO 2014:結果報告
-
 2014年11月10日
2014年11月10日G空間EXPO 2014:出展告知
-
 2014年10月08日
2014年10月08日第3回準天頂衛星シンポジウム[開催告知]
-
 2014年11月05日
2014年11月05日第3回準天頂衛星シンポジウム[速報]
-
 2014年11月21日
2014年11月21日第3回準天頂衛星シンポジウム[開催レポート]
-
 2014年09月25日
2014年09月25日[告知] QSUS発表会・懇親会
-
 2014年10月09日
2014年10月09日[報告] QSUS発表会・懇親会
-
 2014年09月19日
2014年09月19日PS-QZSS及びIS-QZSS説明会(2014年10月)のご案内
-
 2014年12月11日
2014年12月11日防災利用実証(2014年9月):結果
-
 2014年10月20日
2014年10月20日防災利用実証(2014年9月):開催レポート
-
 2014年09月10日
2014年09月10日第2回準天頂衛星利用拡大アイデアソン開催レポート
-
 2014年09月03日
2014年09月03日第2回準天頂衛星シンポジウム:開催レポート
-
 2014年05月07日
2014年05月07日[告知] 準天頂衛星アプリコンテスト2014
-
 2014年05月07日
2014年05月07日[告知] 準天頂衛星アプリコンテスト2014:応募規約
-
 2014年06月06日
2014年06月06日[報告] 準天頂衛星アプリコンテスト2014:出展作品
-
 2014年07月24日
2014年07月24日[報告] 準天頂衛星アプリコンテスト2014:審査結果
-
 2014年02月12日
2014年02月12日準天頂衛星シンポジウム:開催レポート
-
 2013年12月10日
2013年12月10日準天頂衛星利用拡大アイデアソン:開催レポート
