







ガリレオを4機まとめて打ち上げ可能な理由は?
11月17日、欧州の測位衛星「ガリレオ(Galileo)」4機がアリアン5 ESロケットで打ち上げられた。これまでは、打ち上げ能力が小さい「ソユーズ」ロケットで2機ずつ打ち上げて試験や検証を行っていたが、これからは4機ずつ打ち上げて、衛星測位システム構築を加速させる。
ところで世界の衛星測位システムを見渡すと、米国のGPSと中国のBeiDou、インドのIRNSSは衛星を1機ずつ打ち上げている。日本の準天頂衛星システムも1回の打ち上げで1機だ。対してロシアのGLONASSは、1度に3機まとめて打ち上げている。このような違いはどこから生まれるのだろうか。そもそも、なぜガリレオは4機まとめて打ち上げができるのだろうか。
ロケットの能力と衛星の重量の関係

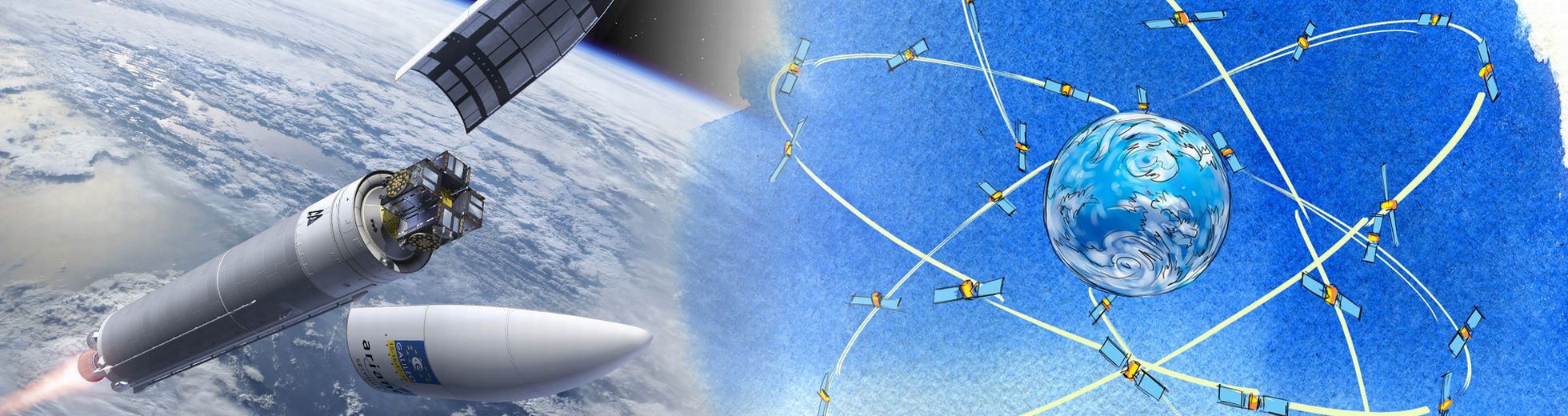
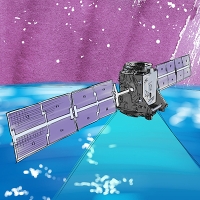
アリアン5 ESによるガリレオの4機同時打ち上げ(イメージCG、Copyright:ESA)
一番大きな理由は、各国・各機関の手持ちのロケットの打ち上げ能力と、各測位衛星の打ち上げ時重量との関係だ。打ち上げ能力の大きなロケットを保有していて、同時に測位衛星の重量が軽ければ、複数衛星の同時打ち上げが可能になる。
また、重量的に打ち上げ可能というだけでは駄目で、打ち上げ時に衛星を空気抵抗から保護する衛星フェアリング内に、衛星および衛星を固定するアダプターが、きちんと収まることも条件となる。
欧州の場合、打ち上げに使った「アリアン5 ES」ロケットは、高度400kmの地球低軌道に21トンものペイロードを打ち上げる能力がある。対して、ガリレオ衛星は1機715~717kgで、今回の衛星4機の合計重量は2865kgだった。
打ち上げる軌道は、軌道高度が2万3222kmの円軌道なので、低軌道に比べると打ち上げには大きなエネルギーが必要。逆に言えば、打ち上げられる衛星重量は小さくなる。しかし、アリアン5の余裕ある打ち上げ能力をもってすれば、第2段を複数回噴射することで、この軌道に直接4機のガリレオ衛星を投入することができる。
第2段噴射を複数回行うのは、軌道の最適の位置、つまりエネルギー最小で軌道高度を上げることができる場所で噴射を行い、軌道を持ち上げていくためだ。ある軌道から別の軌道に乗り移る場合、使用するエネルギー最小で乗り移る方法が存在する。ホーマン遷移という方法である。基本は比較的単純で「遠地点高度を持ち上げたい場合には近地点で噴射、近地点を持ち上げたい場合には遠地点で噴射」というものだ。これは軌道高度を上げる場合だが、下げる場合にも同じ原理が適用できる。
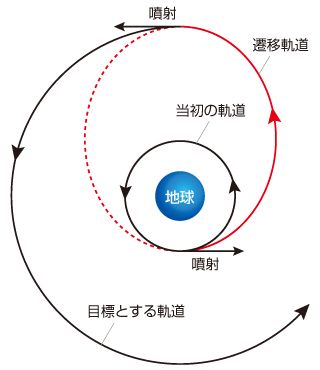
ホーマン遷移の原理
高度数百kmの円軌道 ── 地球低軌道から、高度2万3222kmの円軌道、つまりガリレオ衛星が使う軌道へと移る場合を考えてみよう。まず、地球低軌道において適当なタイミングでロケットエンジンを噴射する。すると噴射した場所の地球を挟んだちょうど反対側の軌道高度が持ち上がり、軌道は楕円を描くようになる。持ち上がった軌道の遠地点が2万3222kmになるように噴射を調節すれば、衛星は楕円軌道は近地点が地球低軌道に、遠地点が高度3万3222kmの軌道に入ることになる。次に衛星が遠地点に来た時に、またエンジンを噴射する。すると今度は近地点側の高度が持ち上がる。近地点の高度がちょうど2万3222kmになるようにすれば、衛星の軌道は高度2万3222kmの円軌道となる。このように複数回に噴射を分けることで、使用するエネルギー最小で、軌道を持ち上げることができるわけだ。
アリアン5 ESは、モノメチルヒドラジンと四酸化二窒素という組み合わせの推進剤を使うEPS L10という第2段を使用している。この第2段は、軌道上で何度も着火→噴射→停止というサイクルを繰り返すことができる。軌道を持ち上げるのに必要なエネルギーが最小となる位置を選んで噴射を繰り返すことで、ガリレオ衛星を効率的に目指す軌道に投入したわけである。
同じ軌道への配置が、複数打ち上げの条件

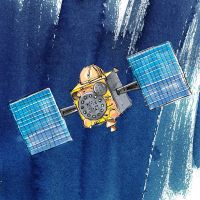
ガリレオの軌道(イメージCG、Copyright:ESA)
ところが、大きなロケットと軽い衛星を持っていたとしても、それだけで複数衛星を同時に打ち上げられるとは限らない。同時に打ち上げる衛星は同じ軌道に投入される。その後、衛星に搭載したスラスター(小さなロケットエンジン)を噴射して、軌道上の位置(このことを位相という)を調整する。位相の調整にはほんの少しの推進剤しか使わないのでこのようなことが可能なわけだ。
しかし軌道傾斜角や高度、あるいは傾斜の傾きが異なる軌道へ乗り移るには、大量の推進剤が必要で、とても衛星のスラスターではできない。いや、たとえロケットの第2段を使ったとしてもできるかできないかの大仕事となる。それだったら、最初から別のロケットで打ち上げたほうがよい。つまり、同じ軌道に複数の衛星が配置されるシステムであることが、同時衛星複数打ち上げの条件となる。
ガリレオは、軌道の傾きの方向が120度ずつ異なる、軌道傾斜角56度、軌道高度2万3222kmの円軌道に、それぞれ10機ずつのガリレオ衛星を配置する合計30機の衛星で構成されるシステムだ。衛星の配置方法が、複数衛星の同時打ち上げに向いているわけである。
各軌道面はA、B、Cと命名されていて、それぞれの軌道での衛星が落ち着くべき位置(位相)は01から10までのナンバーで呼称される。この位置のことを「衛星スロット」という。今回まとめて打ち上げられたガリレオ衛星4機は「C01」「C03」「C06」「C08」という軌道スロットに配置された。
GPSは政策的に1回に1機ずつ打ち上げ

GPS ブロックIIF(イメージCG、出典:GPS公式サイト「GPS.GOV」)
ここで少し、他の測位衛星システムの打ち上げ方法にも触れておこう。米国のGPS衛星は、最新の「GPS ブロックIIF」衛星が1630kgとガリレオの衛星よりも大きく、1回に1機ずつ打ち上げている。打ち上げには「デルタ4M」(打ち上げ能力は地球低軌道に12トン)と「アトラスV 401」(同9.7トン)の2機種のロケットを使用している。
米国は「一方のロケットで事故が起きても、もう一方のロケットで打ち上げを継続するために、2種類のロケットを並行して使用する」という政策を採用している。デルタ4Mの打ち上げ能力がやや大きく「打ち上げ能力の無駄遣い?」とも思えるが、これは政策的に事故発生時に受ける損害を小さくするためなのだ。
中国のBeiDouも、衛星を1機ずつ「長征3B」または「長征3C」ロケットで打ち上げている。BeiDouは、静止軌道衛星、対地同期軌道衛星、高度2万1500kmの中高度衛星と3種類の衛星を使うシステムであり、静止軌道と対地同期軌道の衛星は、今後も1機ずつ打ち上げるようだ。一方、今年11月には大型の「長征5」ロケットの初打ち上げが成功したので、中高度衛星は4機の衛星をまとめて長征5で打ち上げることを検討中である。
インドのIRNSSもまた、1回に1機ずつの打ち上げだ。これは、打ち上げに使っているロケット「PSLV」の打ち上げ能力がさほど大きくないからだ。
プロトンで6機のGLONASS衛星打ち上げも検討

ロシアのGLONASS-K(イメージCG、Copyright: mechanik)
ロシアのGLONASSは、同国が大型の「プロトン」ロケットを保有していることと、軌道傾斜角64.8度で傾き方向が異なる3つの軌道に、それぞれ8機を配置するという方式なので、プロトンで3機を衛星をまとめて打ち上げている。新世代のGLONASS衛星「GLONASS-K」は重量が750kgで、現在の「GLONASS-M」衛星(重量1480kg)の約半分に軽量化されている。このため、今後は「プロトン」ロケットで6機のGLONASS-K衛星を一度に打ち上げることも検討されている。
日本の準天頂衛星システムは、それぞれの衛星が軌道の傾きの方向が異なる準天頂軌道、または静止軌道に入る。つまり、本質的に複数衛星同時打ち上げがやりにくい軌道の構成だ。だから、準天頂衛星は、1回の打ち上げで1機の衛星を打ち上げることになっている。また、準天頂衛星は打ち上げ時の重量が約4トンと大きいので、H-IIAロケットで2機の衛星を同時に打ち上げられないという理由もある。
今回の打ち上げ成功を受けて2016年12月15日、欧州は衛星18機体制で、ガリレオ衛星測位システムの一般向け運用を開始した。今後、欧州は2017年夏、そして2018年第3四半期と、アリアン5 ESロケットを使って4機ずつガリレオ衛星を打ち上げていく。2020年には、30機の衛星による本格的な測位サービス提供を開始する予定だ。
(松浦 晋也・ノンフィクション作家/科学技術ジャーナリスト)
関連ページ
-
 2020年04月20日
2020年04月20日「日々の座標値」とは何か?
-
 2019年02月25日
2019年02月25日4月7日(日本時間)に2度目の「GPS週数ロールオーバー」
-
 2018年04月28日
2018年04月28日1998年、世界に先駆けてGPS利用ランデブ・ドッキングを実証したきく7号
-
 2017年08月31日
2017年08月31日GPS衛星の世代について
-
 2017年06月13日
2017年06月13日アルマナックとエフェメリスは、測位衛星の“時刻表”
-
 2017年06月10日
2017年06月10日宇宙でも使える衛星測位
-
 2017年01月09日
2017年01月09日CDMA [前編] ── ノイズから信号を拾い上げる
-
 2017年03月26日
2017年03月26日CDMA [後編] ── 正確な距離を読み取る
-
 2016年09月30日
2016年09月30日「電離圏」を電波で測る
-
 2016年07月04日
2016年07月04日「マルチパス」── 何がいけないの?
-
 2016年05月13日
2016年05月13日「電子基準点」大解剖 [前編]
-
 2016年05月14日
2016年05月14日「電子基準点」大解剖 [後編]
-
 2015年10月10日
2015年10月10日航法の歴史(1)電波航法
-
 2015年11月08日
2015年11月08日航法の歴史(2)初期の測位衛星
-
 2015年11月17日
2015年11月17日航法の歴史(3)GPSの登場
-
 2015年12月08日
2015年12月08日航法の歴史(4)SAの廃止
-
 2016年01月27日
2016年01月27日航法の歴史(5)GLONASSの蹉跌
-
 2016年02月19日
2016年02月19日航法の歴史(6)民間に便利なシステムを目指すガリレオ
-
 2016年03月22日
2016年03月22日航法の歴史(7)宇宙強国を目指す中国の切り札“BeiDou”
-
 2016年04月25日
2016年04月25日航法の歴史(8)マルチGNSSの登場
-
 2016年06月28日
2016年06月28日航法の歴史(9)安全保障を前に押し出すインドの“IRNSS”
-
 2015年12月25日
2015年12月25日ジオイドとは何か? [前編]
-
 2016年02月09日
2016年02月09日ジオイドとは何か? [後編]
-
 2015年10月27日
2015年10月27日測位衛星の3種類の軌道
-
 2015年09月18日
2015年09月18日宝探しで理解する衛星測位(1)2次元(平面)の測位
-
 2015年09月23日
2015年09月23日宝探しで理解する衛星測位(2)3次元(空間)の測位
-
 2015年09月26日
2015年09月26日宝探しで理解する衛星測位(3)衛星3機での測位
-
 2015年09月29日
2015年09月29日宝探しで理解する衛星測位(4)距離に誤差がある場合の測位
