







航法の歴史(3)GPSの登場
米空軍も異なる航法衛星システムを研究
トランシット(イメージ)
米海軍が、前回解説したトランシット(Transit)航法衛星システムを開発していた1960年代前半、米空軍は同じ目的のために異なる航法衛星システムを研究していた。
トランシットは、潜水艦発射弾道ミサイルを搭載した戦略型原子力潜水艦が自艦の位置を知るためのものだった。対して、米空軍が求めたのは、核兵器搭載の戦略爆撃機や陸上から発射する大型の大陸間弾道ミサイルの使う航法システムだった。
トランシットはミサイル発射時の原潜の位置が分かればよかったが、航空機やミサイルを誘導するためには、移動する自機の位置を継続的に、かつすばやく測定できる必要がある。また、地上の電波航法システムやトランシットでは緯度と経度の2次元の位置を測定するが、航空機やミサイルのためには高度を加えた3次元の位置を測定しなくてはならない。
GPSのルーツとなる「プロジェクト621B」
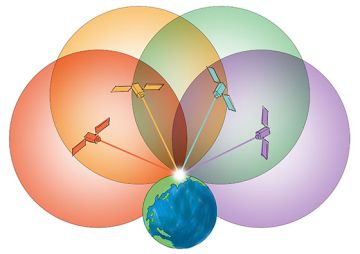
4機以上の衛星から受信して位置を計測(イメージ)
1963年、米空軍は「プロジェクト(Project)621B」という名称で、新しい航法衛星システムの概念をまとめあげた。現在のGPSのルーツである。
トランシットでは自分の位置を知るために、衛星からの電波のドップラー・シフトを利用した。対してGPSでは、「電波の発射時刻と到達時刻が分かると、電波源と受信位置との距離が分かる」という事実を使う。発射時刻と到達時刻の時間差に毎秒30万kmという電波の速度を掛けると電波源と受信位置の距離が計算できる。軌道が分かっている衛星から時刻情報の入った電波を受信すれば、衛星との間の距離が分かるわけだ。
ここから先は、中学で習った連立方程式と同じだ。調べるのは自分の3次元の位置(変数をx、y、zとしてもいいだろう)と時刻tという4つの数字である。4つの変数を完全に決めるためには4つの等式による連立方程式を解く必要がある。つまり軌道が分かっている4機の衛星から電波を同時に受信すれば、高度も含めた自分の位置と時刻を計算で知ることができるのだ。
しかし、1960年代、この方法の実現には2つの困難が存在した。1つは、衛星から極めて正確な時刻情報を送ってやる必要があるということだった。つまり、衛星に非常に正確な時計を搭載する必要がある。当時、宇宙空間で動作する高精度の時計は存在しなかった。
高精度の原子時計を搭載した「タイメーション」

多数の衛星が地球を回る(イメージ)
時計がないなら新たに時計を開発するところから始める必要がある。技術開発に着手したのは空軍ではなく、海軍調査研究所(NRL; Naval Research Laboratory)だった。じつは海軍も空軍と同じく時刻情報を使う次世代測位衛星システム「タイメーション(Timation)」を独立して研究していたのである。
1964年に高精度の宇宙用原子時計を搭載した実験衛星の開発を開始。1967年に最初の衛星「タイメーション-1」が打ち上げた。その後もタイメーション衛星は1977年までに合計4機を打ち上げ、軌道上で動作する原子時計と、その時刻情報を使った測位実験を実施した
もう1つの困難は、「地球のどの場所でも常に4機以上の衛星からの電波を安定的に受信できる」ようにするためには、非常に多くの衛星を必要とすることだ。トランシットは5機の衛星で全世界での測位を可能にしたが、この方式ではより多数の衛星が必要になる。しかもそれぞれの衛星には先端技術である高価な原子時計を搭載しなくてはいけない。
また、測位衛星システムを一度構築すればそれでおしまいというわけにはいかない。使用し続けるためには、寿命の尽きた衛星に代わる新しい衛星を継続的に打ち上げていく必要がある。システム構築と維持の費用は相当な巨額になることが予想された。激しく競っていた空軍と海軍は、計画を一本化し、新たな測位衛星計画は、国防総省の意志決定プロセスを昇っていった。
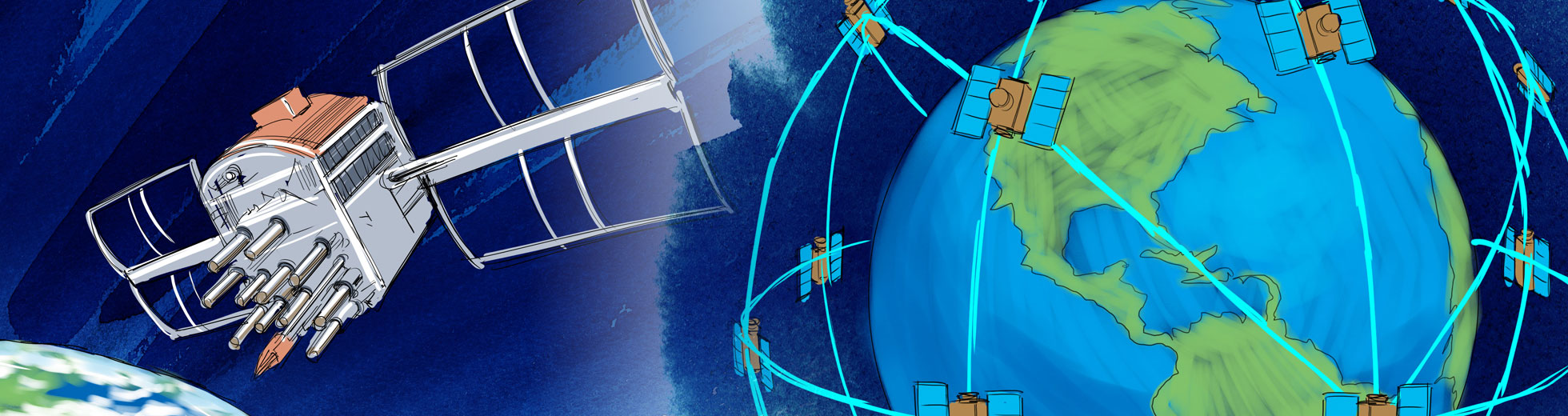
衛星24機以上の大規模システムとして稼働

ナブスター(イメージ)
そして冷戦という時代状況が巨額の出資を可能にした。米議会は、新しい航法衛星システムがソ連という巨大な敵に備えるために必要だと認めたのである。
最終的にGPSは24機の衛星からなる大規模なシステムとなった。GPSが使用するのは、高度2万km、軌道傾斜角(赤道に対する傾き)55度の軌道だ。それぞれ傾きの向きが異なる6つの軌道に、1軌道あたり4機の衛星を90度間隔で配置する。このようにすることで、世界中のどこでも、最低でも4機以上の衛星からの電波の受信を可能にする。実際には、故障に備えて6つの軌道にそれぞれ1機以上の予備衛星も配置するので、30機以上もの衛星を擁するシステムとなる。
各衛星には高精度の原子時計が搭載してあり、自衛星の軌道情報と正確な時刻とを電波に乗せて送信する。受信機はそれらの情報から、自分の位置を算出するわけだ。
GPSの各衛星は「ナブスター(Navstar)」という名称を持つ。第1世代の衛星「ナブスター・ブロックI」は1978年2月から打ち上げが始まり、1985年までに10機の衛星を打ち上げた。ナブスター・ブロックIは最初の衛星ということもあり、実験的要素も強かった。もちろん10機だけでは、測位可能な時間帯も限られる。
続いて1989年2月から、最初の実用衛星というべき第2世代衛星「ナブスター・ブロックII」の打ち上げが始まった。1989年には5機、1990年には4機が打ち上げられ、ブロックI衛星と併せて、測位可能な時間帯はじわじわと長くなっていった。
ここで測位衛星システムにとって決定的というべき歴史的事件が起きる。1990年8月2日、フセイン大統領率いるイラクが、突如隣国のクウェートに侵攻したのである。
(松浦 晋也・ノンフィクション作家/科学技術ジャーナリスト)
航法の歴史(全9回)
-
 2020年04月20日
2020年04月20日「日々の座標値」とは何か?
-
 2019年02月25日
2019年02月25日4月7日(日本時間)に2度目の「GPS週数ロールオーバー」
-
 2018年04月28日
2018年04月28日1998年、世界に先駆けてGPS利用ランデブ・ドッキングを実証したきく7号
-
 2017年08月31日
2017年08月31日GPS衛星の世代について
-
 2017年06月13日
2017年06月13日アルマナックとエフェメリスは、測位衛星の“時刻表”
-
 2017年06月10日
2017年06月10日宇宙でも使える衛星測位
-
 2017年01月09日
2017年01月09日CDMA [前編] ── ノイズから信号を拾い上げる
-
 2017年03月26日
2017年03月26日CDMA [後編] ── 正確な距離を読み取る
-
 2016年12月31日
2016年12月31日ガリレオを4機まとめて打ち上げ可能な理由は?
-
 2016年09月30日
2016年09月30日「電離圏」を電波で測る
-
 2016年07月04日
2016年07月04日「マルチパス」── 何がいけないの?
-
 2016年05月13日
2016年05月13日「電子基準点」大解剖 [前編]
-
 2016年05月14日
2016年05月14日「電子基準点」大解剖 [後編]
-
 2015年10月10日
2015年10月10日航法の歴史(1)電波航法
-
 2015年11月08日
2015年11月08日航法の歴史(2)初期の測位衛星
-
 2015年12月08日
2015年12月08日航法の歴史(4)SAの廃止
-
 2016年01月27日
2016年01月27日航法の歴史(5)GLONASSの蹉跌
-
 2016年02月19日
2016年02月19日航法の歴史(6)民間に便利なシステムを目指すガリレオ
-
 2016年03月22日
2016年03月22日航法の歴史(7)宇宙強国を目指す中国の切り札“BeiDou”
-
 2016年04月25日
2016年04月25日航法の歴史(8)マルチGNSSの登場
-
 2016年06月28日
2016年06月28日航法の歴史(9)安全保障を前に押し出すインドの“IRNSS”
-
 2015年12月25日
2015年12月25日ジオイドとは何か? [前編]
-
 2016年02月09日
2016年02月09日ジオイドとは何か? [後編]
-
 2015年10月27日
2015年10月27日測位衛星の3種類の軌道
-
 2015年09月18日
2015年09月18日宝探しで理解する衛星測位(1)2次元(平面)の測位
-
 2015年09月23日
2015年09月23日宝探しで理解する衛星測位(2)3次元(空間)の測位
-
 2015年09月26日
2015年09月26日宝探しで理解する衛星測位(3)衛星3機での測位
-
 2015年09月29日
2015年09月29日宝探しで理解する衛星測位(4)距離に誤差がある場合の測位
