








ユーザー環境性能評価:農業(カワサキ機工:クローラ型車両の自動走行)
カワサキ機工:みちびきを利用した農業現場で利用できるクローラ型自律走行車両の開発と実証
<背景と目的>
農業における生産現場の現状として、農業経営体の統合・減少に伴い管理する農地面積が大きく増加していることや、農業人口が急速に減少するため生産効率を上げないと大面積の農地を管理できないことが挙げられ、生産現場においては自動化等を用いた効率的な管理技術の開発と普及が喫緊の課題となっている。
今回の事業では、みちびきからのセンチメータ級測位補強サービスを利用するクローラ型自律走行車両を開発し、農業環境における走行制御技術の実証を目的とした。
<実証者>
カワサキ機工株式会社
イームズロボティクス株式会社、静岡県農林技術研究所
<実証期間>
2020年11月~2021年2月
<実証場所>
静岡県農林技術研究所(静岡県磐田市):平地及びレタス圃場
茶圃場(静岡県掛川市):中山間地、茶圃場
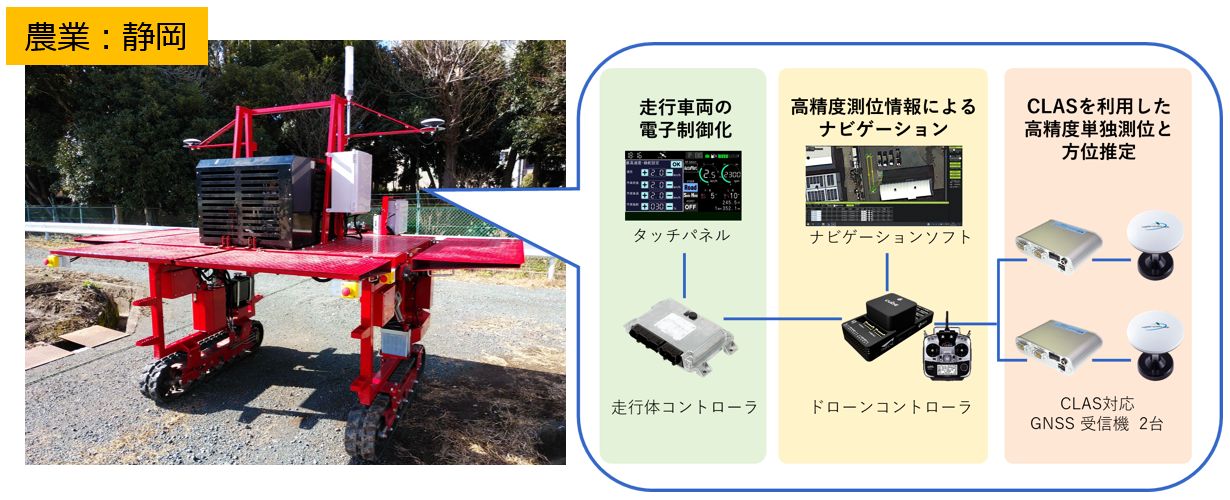
静岡県農林技術研究所が所有するクローラ型走行車両を改造

レタス圃場での自律走行試験

茶圃場での自律走行試験
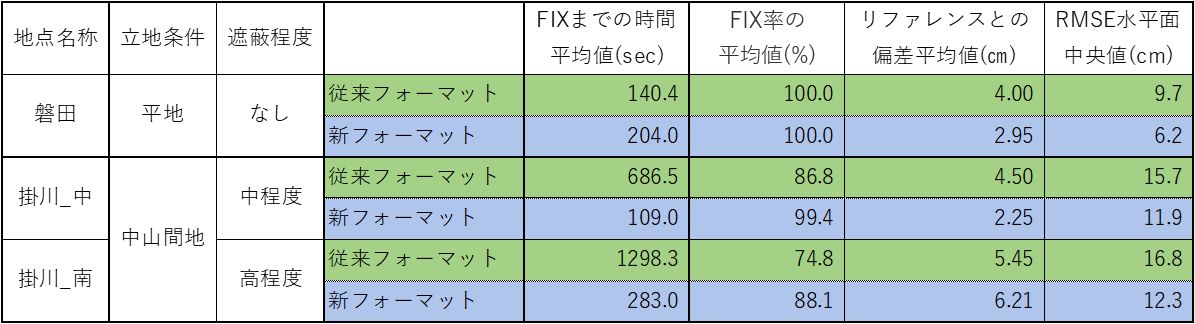
遮蔽による測位への影響及び補強対象衛星数の違いによる測位への影響(上段:最大11機、下段:最大17機)

磐田(平地)

掛川(中山間地)
補強対象衛星数が11機から最大17機に拡大されたCLAS新フォーマットにおける測位評価では、従来フォーマットと比較してFIX率が10%程度向上し、FIXまでに要する時間、精度も改善傾向であることを確認した。
補強対象衛星数が11機から最大17機に拡大されたCLAS新フォーマットにおける測位評価では、従来フォーマットと比較してFIX率が10%程度向上し、FIXまでに要する時間、精度も改善傾向であることを確認した。特に遮蔽物の影響が大きい場所での改善効果が顕著であり、通信ネットワークが脆弱な中山間地圃場で、みちびき活用の期待が高まる結果を得られた。
今回特定の条件下であるが、圃場での旋回動作を含む畝内自律走行に繰り返し成功できたことは、みちびきCLASの精度の高さを示す大きな成果といえる。
関連ページ
※本文中の画像・図版提供:カワサキ機工株式会社
-
 2026年05月18日
2026年05月18日成瀬ダムにおけるCLAS測位実証結果
-
 2024年11月14日
2024年11月14日CLAS実証実験報告:公益財団法人日本測量調査技術協会
-
 2022年11月29日
2022年11月29日ユーザー環境性能評価:土木建設(QSS:ダム工事におけるCLAS精度検証)
-
 2022年10月20日
2022年10月20日ユーザー環境性能評価:鉄道(QSS:道南いさりび鉄道におけるCLAS測位状況調査)
-
 2022年08月24日
2022年08月24日ユーザー環境性能評価:自動車(QSS:一般道におけるCLAS測位状況調査)
-
 2021年11月18日
2021年11月18日CLASの従来フォーマットと新フォーマットの違い
-
 2021年11月18日
2021年11月18日今期と元期とCLAS座標
-
 2017年09月28日
2017年09月28日CLASテストライブラリ
