








成瀬ダムにおけるCLAS測位実証結果
<目次>
鹿島建設様施工中の成瀬ダムにおける試験実施概要を下記に示します。
・実施場所:成瀬ダム(秋田県東成瀬村)[下図参照]
・実施日:2024年10月7日-10月9日
・実施目的:実環境(ダム建設現場)におけるCLAS測位の安定性と精度を検証する。
実環境の例として成瀬ダム建設現場において重機搭載アンテナを用いてCLAS測位を実施し、
本測位結果と鹿島建設様既搭載受信機のRTK測位結果を比較する。

[図1]成瀬ダム施工風景(現場イメージ、展望台より2024年10月撮影)
[図2]成瀬ダム所在(出典:Googleマップ)

[図3]受信機搭載重機(提供:鹿島建設様)
(1)試験機器構成
▽実証における機器構成概要は[図4]のとおりです。重機に搭載する1台のGNSSアンテナ(トプコン製PG-F1)からRFケーブルで配分し、鹿島建設様保有のRTK受信機(トプコン製MR-2)とCLAS受信機(AQLOC端末)それぞれに接続する構成としました。RTK測位結果は受信機とLANで接続されるPC端末に保存され、CLAS測位結果は受信機のメモリカードに保存しました。
▽鹿島建設様設置の基準局にて補正情報を生成し、当該補正情報をデジタル無線を通して送信することでRTK測位をしております。現場内における基準局の設置位置は[図5]のとおりとなります。
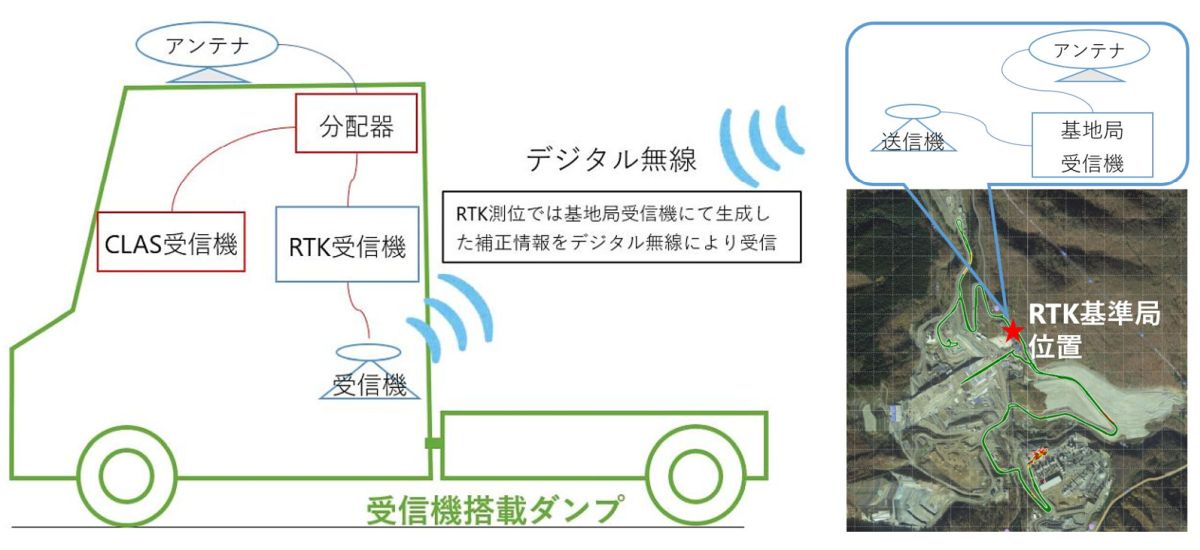
[図4]試験機器構成図(左)、[図5]RTK基準局位置(右)(地図画像出典:Googleマップ)
(2)評価方法
▽CLAS測位とRTK測位、2つの測位方式の測位結果を比較したものを評価結果としました。
▽RTK測位では、1Hzで受信機内搭載アルゴリズムによるリアルタイム測位であり、
CLAS測位では同様に1Hzで、AQLOC端末内アルゴリズム(CLASLIB)によるリアルタイム
測位を実施しております。
▽評価におけるRTK測位結果の扱いは、以下のとおりとしました。
※RTK測位結果にも一定の誤差が含まれるが、
RTK測位結果をリファレンスとしたCLAS測位結果との差分で評価した。
※RTKのFIX解について、
精度に影響のあるばらつきが見られないことを軌跡の連続性から確認している。
▽今回測位実証では、AQLOC端末を用いて、鹿島建設様保有の重機2台にそれぞれ搭載してCLAS連続測位を実施しました。該当の重機2台では鹿島建設様構築済みのRTK測位環境によるRTK測位を同様に実施しております。
▽[図6]に示す時間帯でデータを取得しました。本図においてそれぞれの期間をアルファベットで識別しており、以降は本識別子を利用いたします。
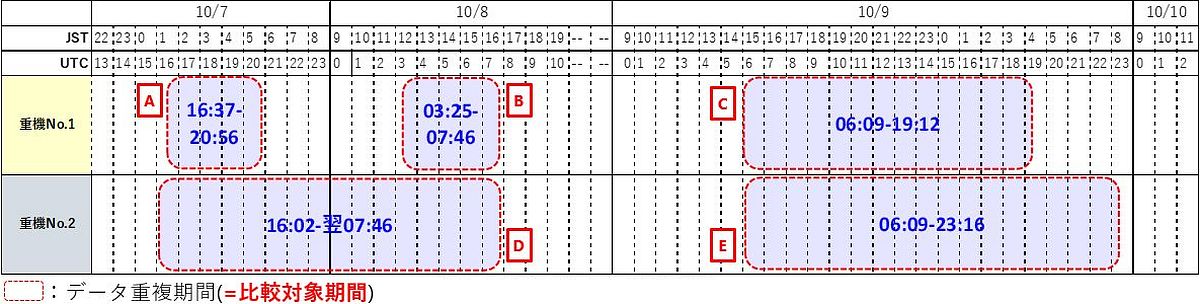
[図6]本実証におけるデータ取得期間
▽プラントにおける重機停車時の画像が[図7]になります。また、プラント位置を地図上に示したものが[図8]になります。[図7]から確認できるとおり、プラントに停車した際には完全にアンテナ周辺が遮蔽され、衛星測位できない状態になります。また、プラント近傍でも高い遮蔽により衛星測位がミスFIXとなったり、FIXしない事象が確認されました。
以上から、今回の評価におけるFIX率評価において衛星測位に不適となるプラント近傍を評価対象外としています。また、測位精度評価においてはFIX解のみを評価対象としています。

[図7]受信機搭載重機プラント停車時(提供:鹿島建設様)

[図8]積込みプラント位置(地図画像出典:Googleマップ)
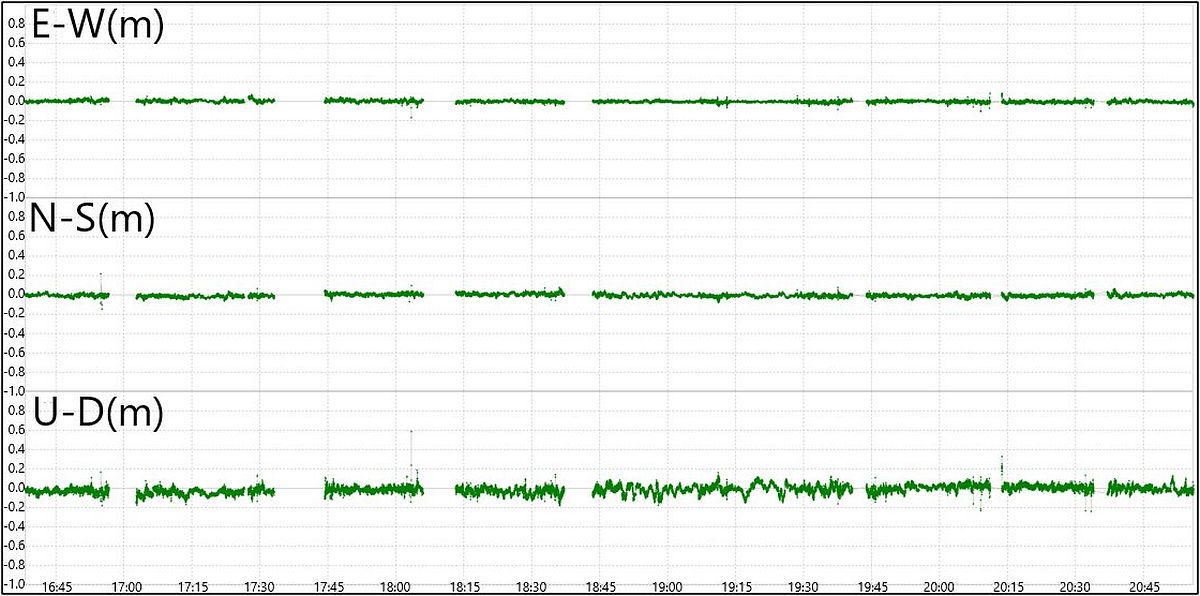
▽プラント近傍を含めた期間Bにおける結果が[図9][図10]のとおりとなります。
▽CLAS、RTKいずれの測位においても
・3軸プロットから確認できるとおり、プラント近傍においては測位解がFIXせず、
測位誤差が大きくなっているのが確認できます。
・地図への重畳プロットからも、赤点線で囲まれたプラント近傍においては
測位解がFIXしていないのが確認できます。
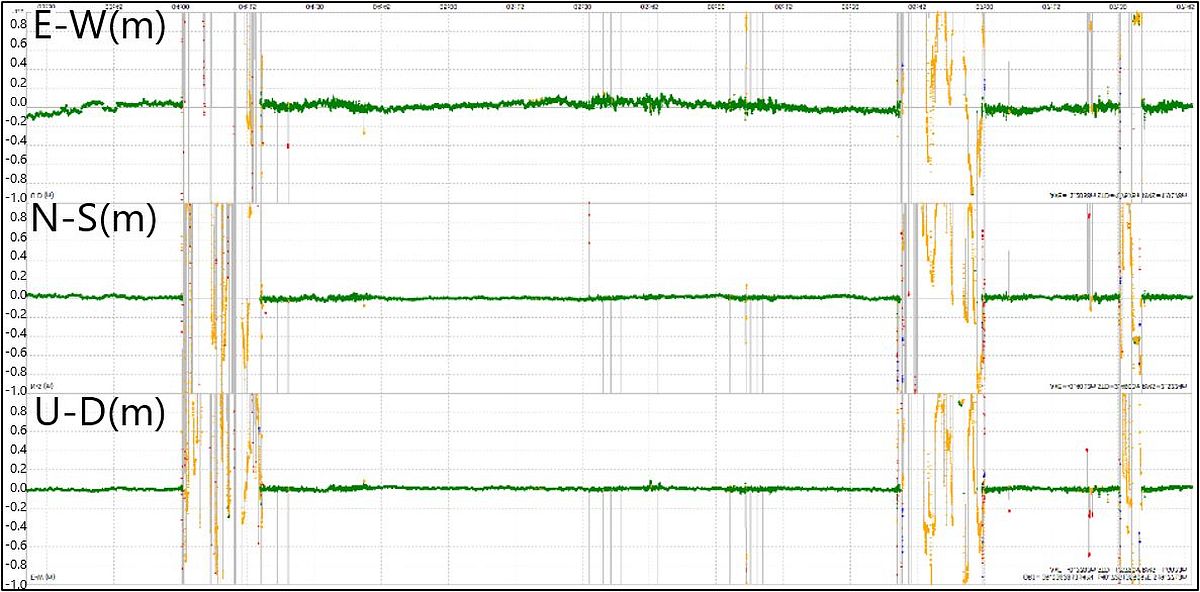
[図9][期間B] RTK測位結果をリファレンスとしたCLAS測位結果3軸プロット(全測位解を含む) ※RTK測位解とCLAS測位解の差分を表しています。
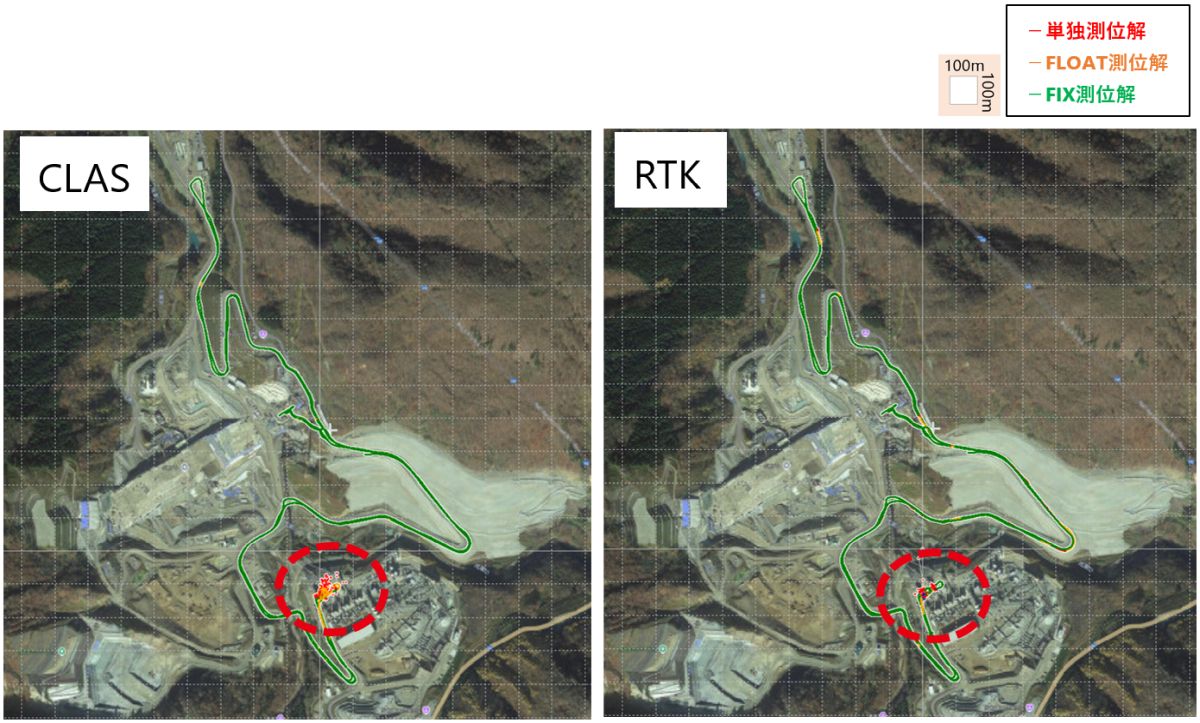
[図10][期間B] 地図上への重畳プロット(地図画像出典:Googleマップ)
▽プラント近傍の場所や時間帯を除いた測位結果を評価対象として比較した、RTK測位とCLAS測位それぞれのFIX率は[表1]のとおりです。
▽測位に使用した衛星システムと、測位時の最大使用衛星数はそれぞれ以下のとおりです。
・RTK:GPS/GLONASS/QZSS 最大使用衛星数:14
・CLAS:GPS/Galileo/QZSS 最大使用衛星数:17
▽いずれも実証期間計で98%を超える高いFIX率が確認できました。CLAS測位のFIX率がRTK測位のFIX率と比較して遜色なく、RTK相当のFIX率となっており、アベイラビリティが十分にあるといえます。
▽CLASにおいては、圧縮された補正情報を準天頂衛星から配信しており、RTK測位と比較した配信補正情報データ容量の違いがあります。また、一度FIXから外れた場合の再FIXに要する時間も両測位方式で異なっており、RTK測位の方が再FIXまでに要する時間が短い傾向があります。
![[表1]プラント近傍を評価対象外としたFIX率](p297ch0000002i1i-img/p297ch0000002ibf.jpg)
※本実証におけるFIX率は測位対象期間における測位解がFIX解となった時間割合を示しています。
▽[表2]がRTK測位解をリファレンスとしたCLAS測位解の95%信頼区間統計値となります。
・解析対象期間を通じて、補強対象衛星数が10機程度で安定していたA、Bにおいては水平斜距離3-4cm程度、垂直7-8cm程度の若干の差異のみが確認できます。
・解析期間内で、補強対象衛星数の大きな減少(6-7機程度)が見られたC、D、Eにおいては水平斜距離7-10cm程度、垂直17-22cm程度の差異が見られます。
・実証期間全体での統計値比較では水平斜距離精度7.4cm、垂直精度20.4cmでした。CLASの移動体測位精度仕様値内となっており、スペック通りの精度で測位できていたことが確認できます。
![[表2]本評価におけるRTKをリファレンスとしたCLAS測位性能](p297ch0000002i1i-img/p297ch0000002ibz.jpg)
※CLAS移動体測位精度仕様
水平斜距離:12[cm] 垂直:24[cm]
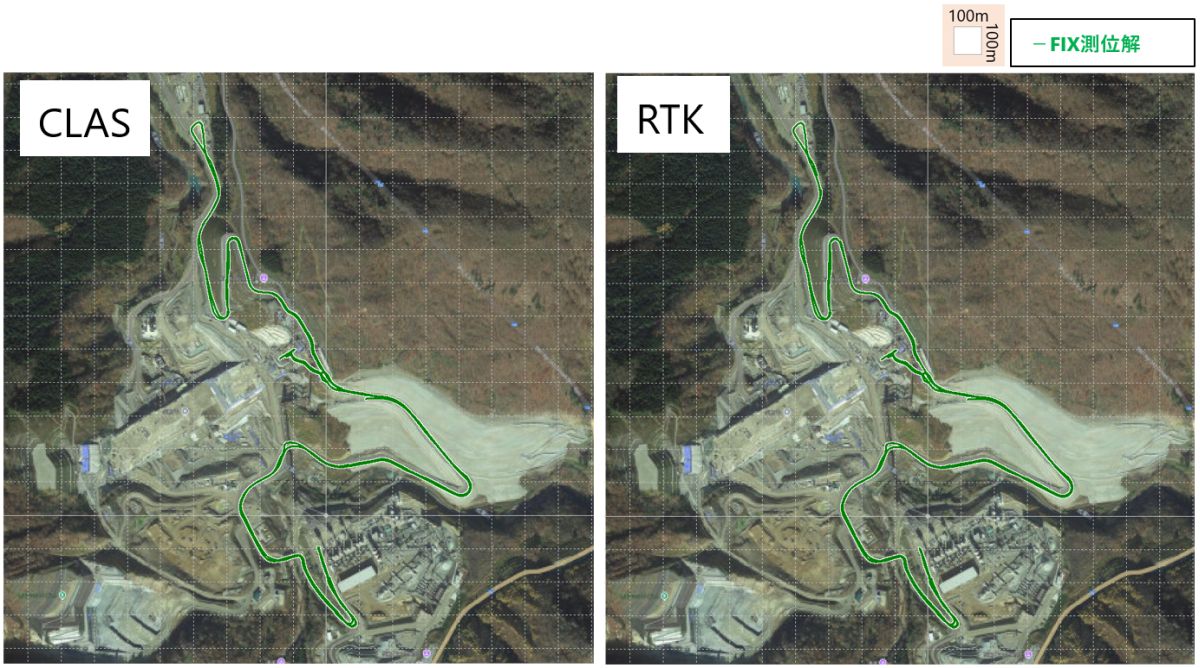
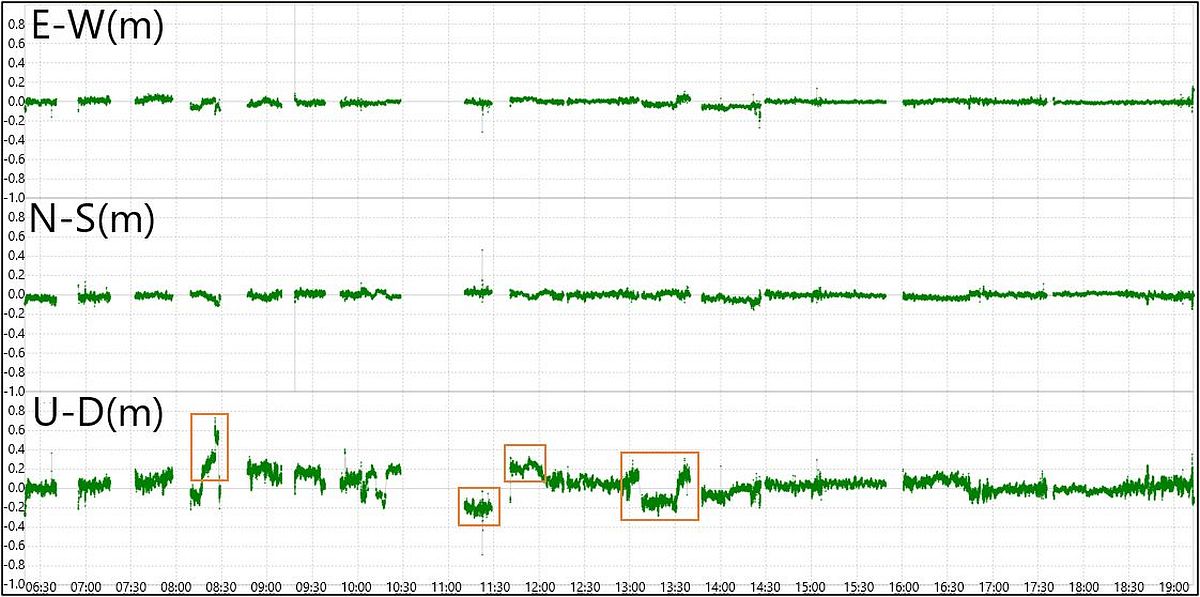
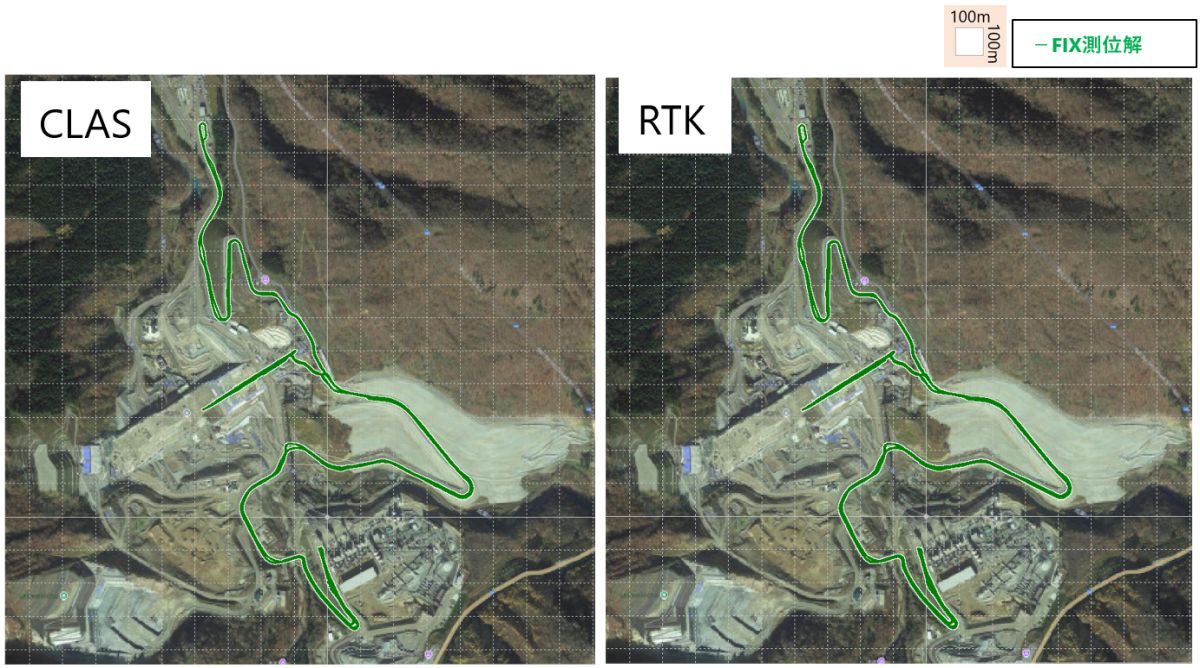
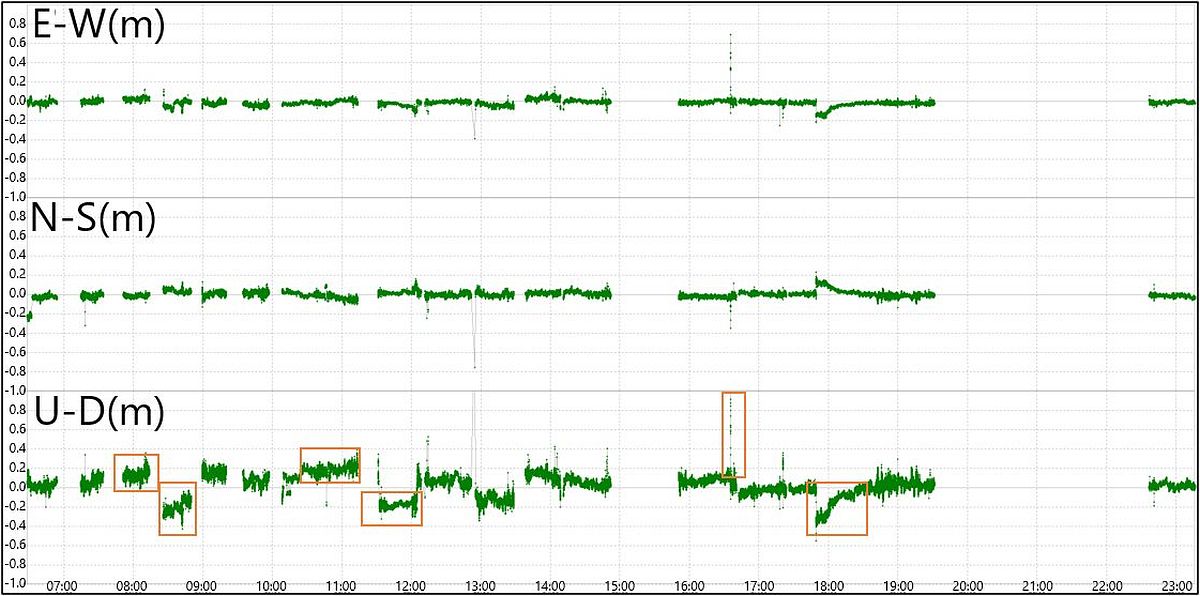
▽期間Aにおける結果が[図11][図12]のとおりとなります。
![[表3][期間A] RTKをリファレンスとしたCLAS測位性能とFIX率](p297ch0000002i1i-img/p297ch0000002ih9.jpg)
[図11][期間A] RTK測位結果をリファレンスとしたCLAS測位結果3軸プロット
※RTK測位解とCLAS測位解の差分を表しています。
※両測位解共にFIX解のみを抽出しています(4.項参照)。
[図12][期間A] 地図上への重畳プロット(地図画像出典:Googleマップ)
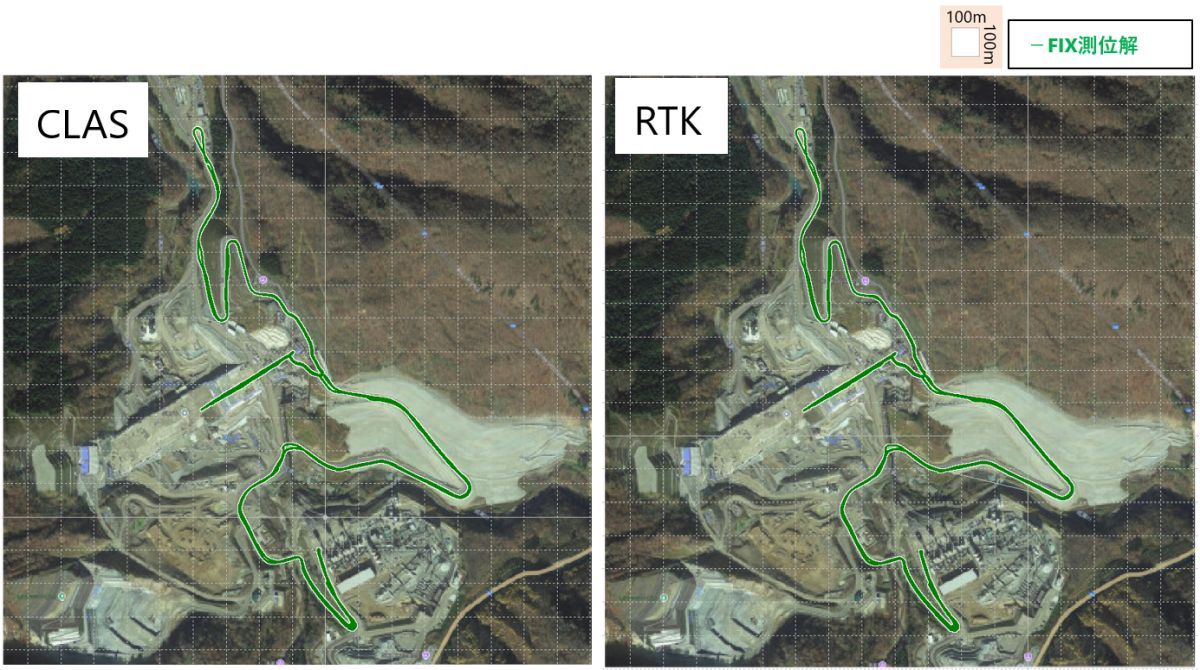
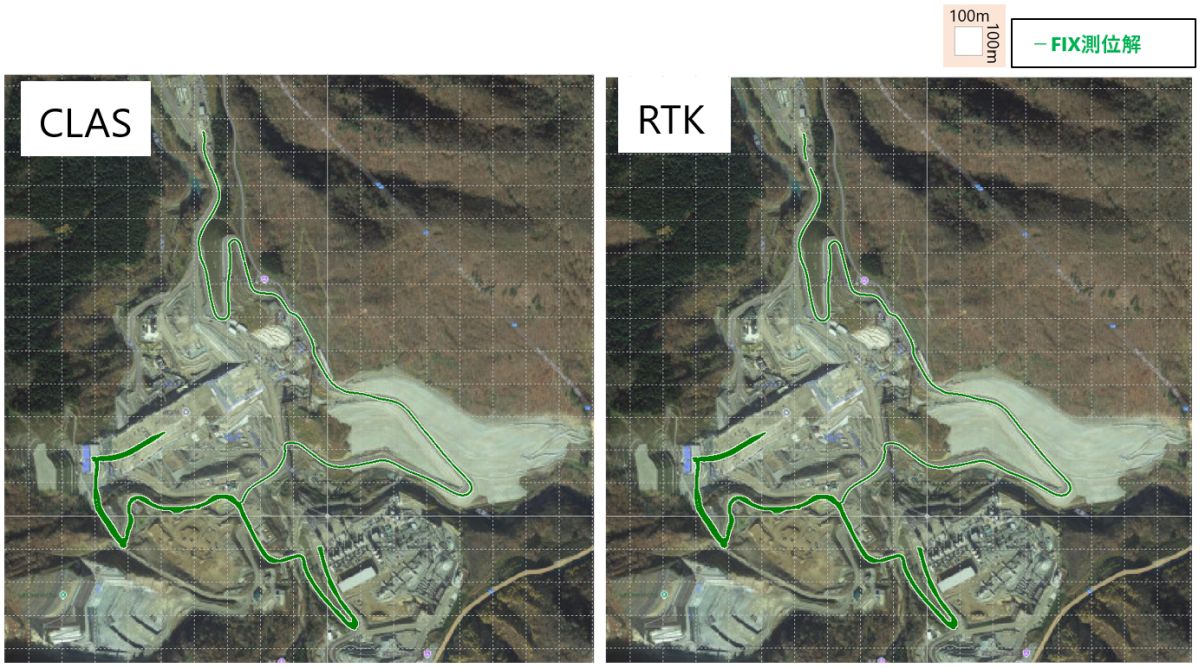
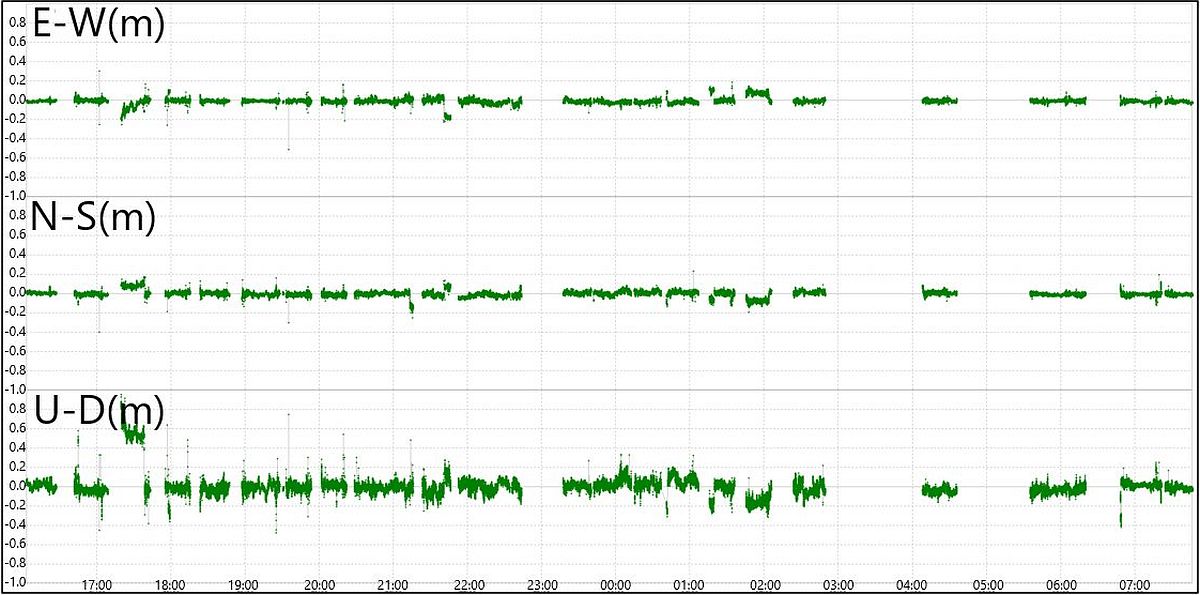
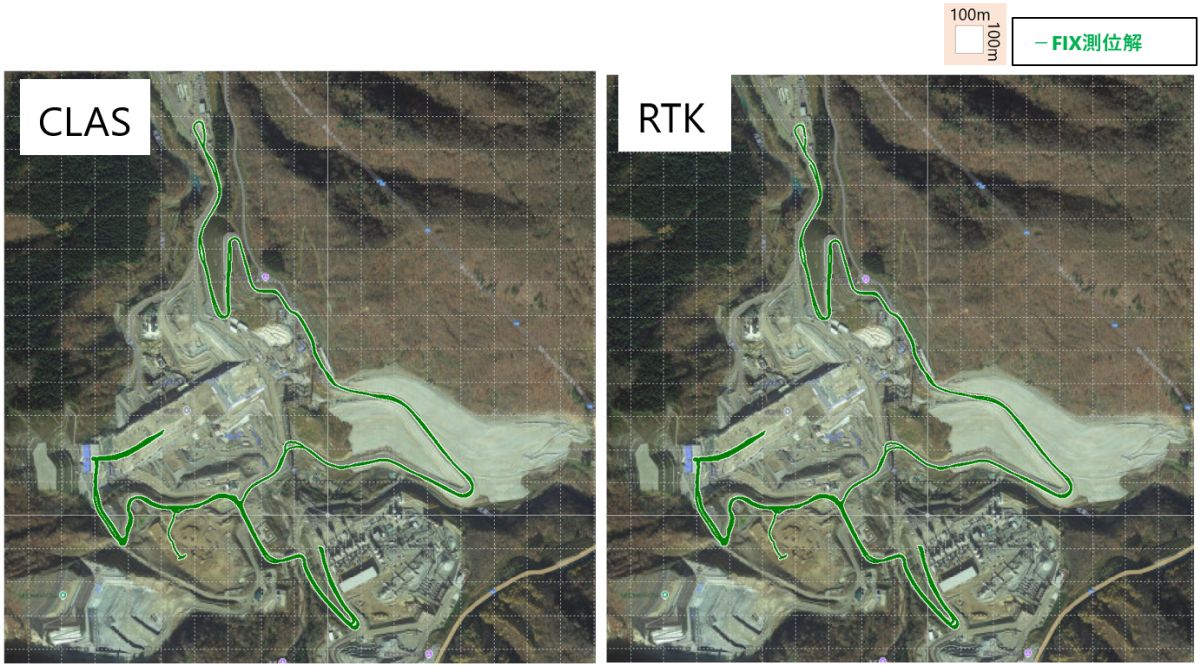
▽期間Bにおける結果が[図13][図14]のとおりとなります。
![[表4][期間B] RTKをリファレンスとしたCLAS測位性能とFIX率](p297ch0000002i1i-img/p297ch0000002ihk.jpg)
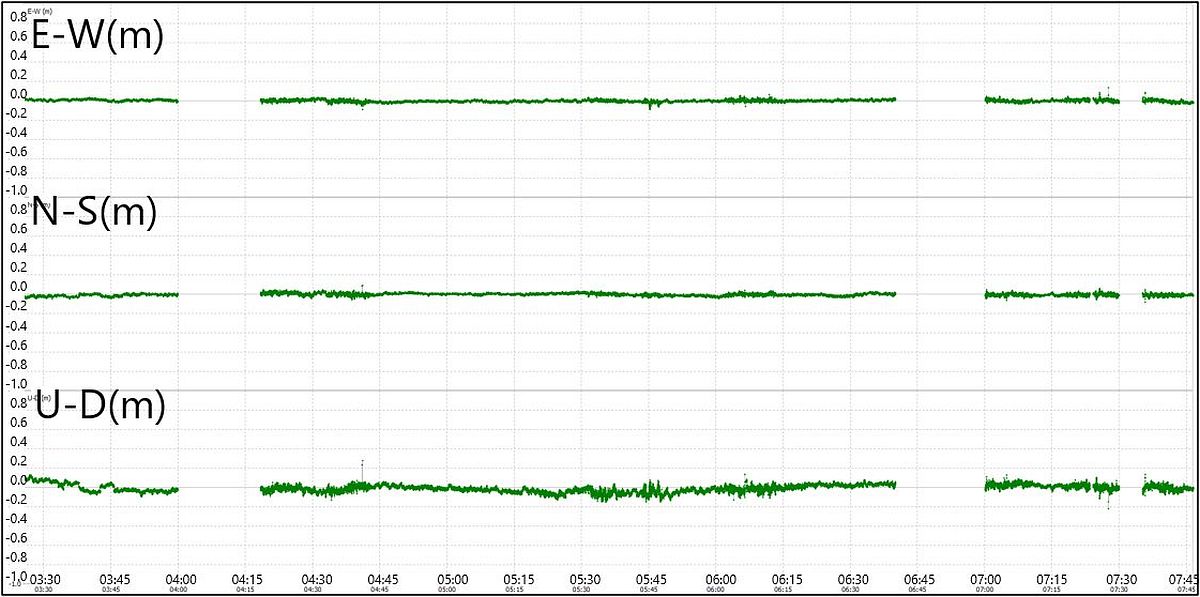
[図13][期間B] RTK測位結果をリファレンスとしたCLAS測位結果3軸プロット
※RTK測位解とCLAS測位解の差分を表しています。
※両測位解共にFIX解のみを抽出しています(4.項参照)。
[図14][期間B] 地図上への重畳プロット(地図画像出典:Googleマップ)
▽期間Cにおける結果が[図15][図16]のとおりとなります。
▽期間Aと比較して、特に高度方向において、CLASにおけるミスFIXと思われる測位が散見されます(複数回走行軌跡の比較や測位解の連続性などから判断いたしました)。一方で水平方向は10cm程度以内の測位誤差であり、CLASの移動体測位精度仕様値内となっておりました。
![[表5][期間C] RTKをリファレンスとしたCLAS測位性能とFIX率](p297ch0000002i1i-img/p297ch0000002ihz.jpg)
[図15][期間C] RTK測位結果をリファレンスとしたCLAS測位結果3軸プロット
※RTK測位解とCLAS測位解の差分を表しています。
※両測位解共にFIX解のみを抽出しています(4.項参照)。
[図16][期間C] 地図上への重畳プロット(地図画像出典:Googleマップ)
▽期間Dにおける結果が[図17][図18]のとおりとなります。
▽期間C同様に、特に高度方向において、CLASにおけるミスFIXと思われる測位が散見されます(複数回走行軌跡の比較や測位解の連続性などから判断いたしました)。一方で水平方向は10cm程度以内の測位誤差であり、CLASの移動体測位精度仕様値内となっておりました。
![[表6][期間D] RTKをリファレンスとしたCLAS測位性能とFIX率](p297ch0000002i1i-img/p297ch0000002iew.jpg)
[図17][期間D] RTK測位結果をリファレンスとしたCLAS測位結果3軸プロット
※RTK測位解とCLAS測位解の差分を表しています。
※両測位解共にFIX解のみを抽出しています(4.項参照)。
[図18][期間D]地図上への重畳プロット(地図画像出典:Googleマップ)
▽期間Eにおける結果が[図19][図20]のとおりとなります。
▽期間C同様に、特に高度方向において、 CLASにおけるミスFIXと思われる測位が散見されます。(複数回走行軌跡の比較や測位解の連続性などから判断いたしました。)
一方で水平方向は10cm程度以内の測位誤差であり、CLASの移動体測位精度仕様値内となっておりました。
![[表7][期間E] RTKをリファレンスとしたCLAS測位性能とFIX率](p297ch0000002i1i-img/p297ch0000002iit.jpg)
[図19][期間E] RTK測位結果をリファレンスとしたCLAS測位結果3軸プロット
※RTK測位解とCLAS測位解の差分を表しています。
※両測位解共にFIX解のみを抽出しています(4.項参照)。
[図20][期間E] 地図上への重畳プロット(地図画像出典:Googleマップ)
▽RTK測位とCLAS測位では、FIX状況にばらつきはあるものの、おおむね衛星可視環境が良いエリアでFIXが得られる傾向は一致していました。一方で、複数の計測期間を通して、同じエリアでCLAS測位解のみがFIXする事象を確認しました。
▽[図21]は期間A内で確認された結果例です。同様の傾向が期間B、Dにおいても確認されました([図22])。当該区間は現場基準局から配信されるデジタル無線を受信しづらい地形であることが確認されました。RTK測位のように基準局から補正情報を地上インフラを用いて送受信する方式と比較して、CLAS測位は補正情報が衛星配信されるため、地上インフラに依らない、衛星配信が受信可能なエリアでFIX解が得られる特徴が表れたと考えられます。
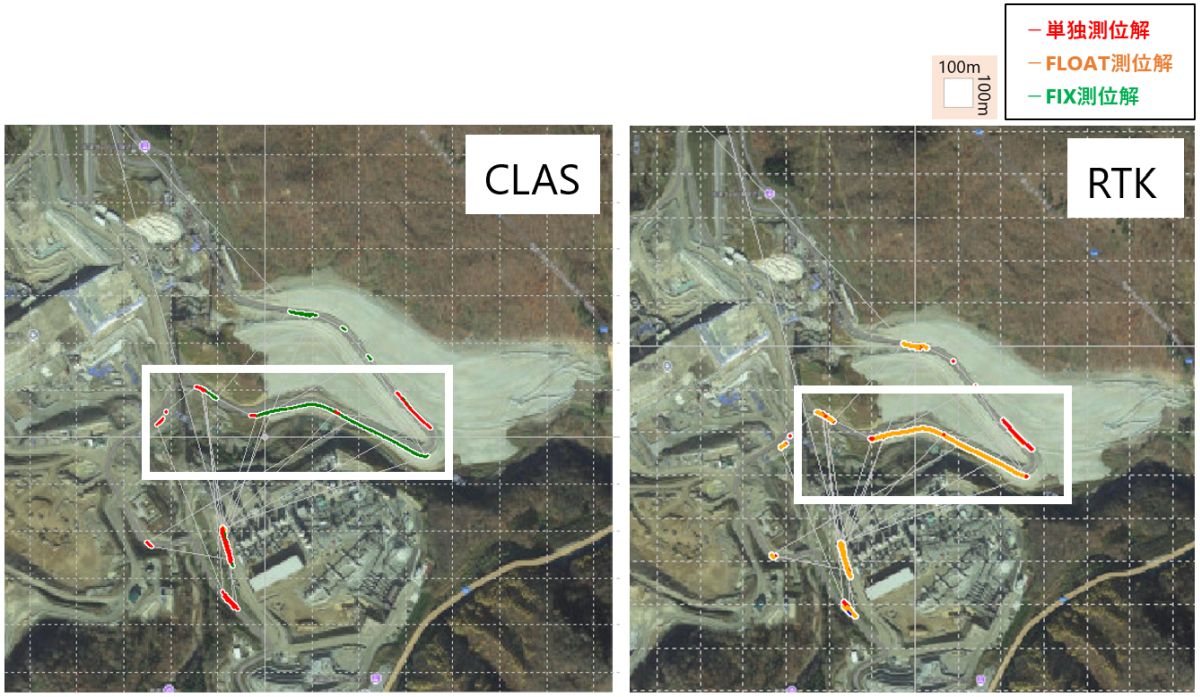
[図21][期間A] CLAS測位(FIX)とRTK測位結果(単独測位・FLOAT)比較プロット(地図画像出典:Googleマップ)
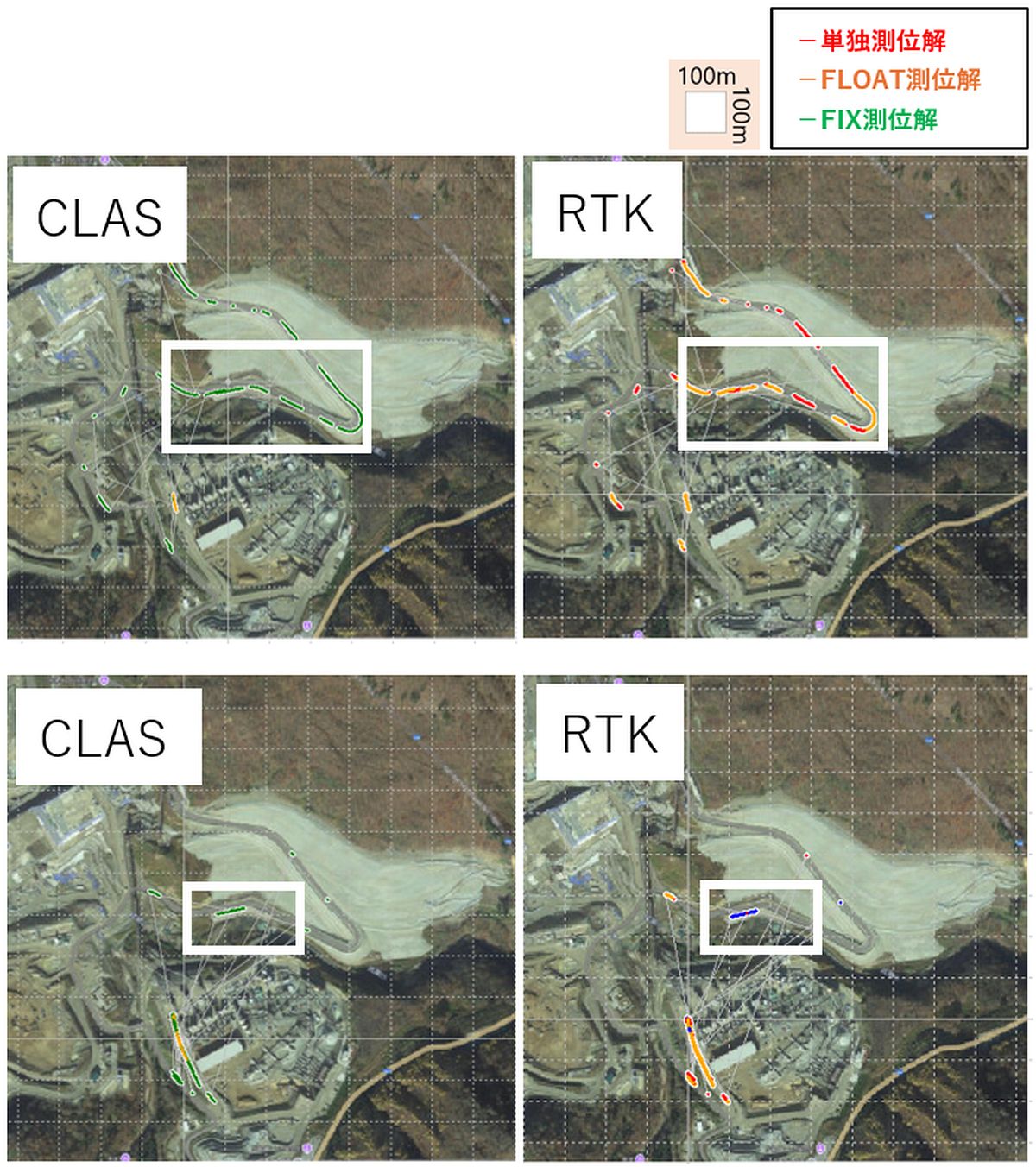
[図22][上:期間B] [下:期間D] CLAS測位(FIX)とRTK測位結果(単独測位・FLOAT)比較プロット(地図画像出典:Googleマップ)
▽車両に搭載する一つのGNSSアンテナ出力を分岐させ、ダム施工現場内を走行しながらRTK測位とCLAS測位を同時に実施した結果を比較しました。
▽FIX率においては、CLAS測位結果はRTK測位結果と比較して、同等に高い結果が確認できました(RTK:99.2%, CLAS:98.1%)
▽測位精度解(FIX解)を比較した場合、CLAS測位性能がRTK測位解同等に高精度となることが確認できました。(RTK測位結果をリファレンスとしたCLAS測位結果 ⇒ 水平精度(95%)[cm]:7.4、垂直精度(95%)[cm]:20.4)
(参考仕様:水平精度(95%)[cm]:12、垂直精度(95%)[cm]:24)
▽一部区間においては、RTK用のデジタル無線が受信しづらい地点で、CLASのみFIX解が得られる状況が確認されました。CLASは衛星配信でのサービスのため地上無線のエリアによらず、安定して高精度解を得られる可能性があります。
▽今回の評価結果から、本ダム建設におけるGNSS運用に関して、CLAS測位結果がRTK測位結果と高精度に近似しており、CLAS測位は目的や用途に因ってはRTK測位の代替として利用可能であると考えられます。
▽高精度測位方式としてVRSなどのネットワークRTKが用いられることが多いですが、LTEなどの携帯キャリア電波が弱い山間部においては、ネットワークRTKが使用できず自前で固定局の設置・運用作業が必要となります。建設現場の重機管理においては設置対象となる台数が多いことから各機にVRS契約を行うことはコスト面の課題となります。上記状況においてもCLAS測位はRTKに準じる精度で測量を行う手段となり得ることが確認できました。
※本文中の画像及び図版:©Mitsubishi Electric Corporation
-
 2024年11月14日
2024年11月14日CLAS実証実験報告:公益財団法人日本測量調査技術協会
-
 2022年11月29日
2022年11月29日ユーザー環境性能評価:土木建設(QSS:ダム工事におけるCLAS精度検証)
-
 2022年10月20日
2022年10月20日ユーザー環境性能評価:鉄道(QSS:道南いさりび鉄道におけるCLAS測位状況調査)
-
 2022年08月24日
2022年08月24日ユーザー環境性能評価:自動車(QSS:一般道におけるCLAS測位状況調査)
-
 2021年11月18日
2021年11月18日ユーザー環境性能評価:農業(カワサキ機工:クローラ型車両の自動走行)
-
 2021年11月18日
2021年11月18日CLASの従来フォーマットと新フォーマットの違い
-
 2021年11月18日
2021年11月18日今期と元期とCLAS座標
-
 2017年09月28日
2017年09月28日CLASテストライブラリ
