








宇宙でも使える衛星測位
(2017年7月3日更新)
※記載内容を一部改訂しました。
──
「遠くに行きたい」(作詞:永六輔、作曲:中村八大)という歌がある。1962年にジェリー藤尾が歌ってヒットし、その後多くの歌手がカバーした。知らない土地をさ迷う心細さと新しい出会いの予感とを、やや寂しげな美しいメロディーに乗せて歌い上げる名曲である。
知らない土地を歩く心細さの幾分かは、自分が今どこにいるかが分からないことに起因している。ところが、いまや私たちはGPSを始めとした衛星測位システムをごく当たり前に使うようになった。スマートフォンにはナビが付くのが当たり前になったし、自動車もカーナビ標準装備が当たり前になった。「遠くに行きたい」の旅情は少し薄れたのかもしれない。
が、そもそも周りに何もない場所だったらどうだろう。旅情も何もあったものではなく、自分の位置がすぐに分かるということは死活問題となる。海洋を航行する船、上空を飛ぶ航空機、砂漠のただ中を行く自動車 ─── 衛星測位システムによりその安全性は大きく向上したと言えるだろう。
もっとも何もない場所。それは宇宙だ。実は衛星測位システムによる測位が使えるのは地上だけではない。宇宙でも使えるのである。
さまざまな要因で衛星の軌道は変化し続ける
GPSを始めとした衛星測位システムは、高度約2万km付近の軌道に衛星を展開している。それぞれの衛星は地表に向けて測位信号を載せた電波を送信している。つまり、衛星測位システムよりも低い高度を巡っている衛星も、測位衛星の電波を受信することで自分の位置を知ることができる。それどころか、現在では衛星測位システムの電波の漏れを利用して、より高い高度を巡る衛星の位置を調べる試みも始まっている。
衛星の位置が分かると、その衛星がどのような軌道で地球を巡っているかが分かる。衛星の運用にとって、正確な軌道を計測する軌道決定という仕事は大変重要だ。まず衛星の軌道がきっちり分からないと、衛星との通信が難しくなる。一般に電波による通信は、情報の伝達速度が高速になるほど、地上局のアンテナをきっちりと衛星に向ける必要がある。静止軌道にある衛星は、空の一点で止まって見えるが、それ以外の衛星は上空を通過していく。アンテナを衛星に向け続け、安定した通信を維持するには、軌道が正確に分かっていなければならない。
また、地球観測衛星では、軌道が正確に分からないと、地上の狙った場所に観測センサーを向けることができない。どこが写っているかは運次第のカメラでは、用途が非常に限られてしまう。
衛星の軌道は、さまざまな要素に影響され、変化する。地球が完全な球ではないこと、衛星高度のごく希薄な大気による空気抵抗などだ。月や他の惑星、太陽の引力も衛星の軌道に影響する。さらには太陽の光の圧力、地球が反射する太陽光の圧力も、長い時間の間には軌道を変えていく。衛星は内部の機器が発生する廃熱を宇宙空間に赤外線の輻射(ふくしゃ)という形で捨てている。この赤外線すらも圧力を発生して、軌道を変える原因となる。
もちろん、衛星が搭載した小さなロケットエンジン(スラスターという)を噴射すれば、軌道は変わる。いつも狙った分だけの噴射ができるわけではない。だから噴射で軌道を調整した後は、軌道決定を実施して、修正のための追加の噴射を行う。
最初にGPSを利用した衛星「ランドサット4」
軌道決定のためにはさまざまな計測方法が使われる。いちばん基本となるのはドップラー変位を使った速度計測だ。近づいてくる救急車のサイレンは音が高く聞こえ、遠ざかる時は低く聞こえる。音の高低の度合いは救急車の速度で決まる。これがドップラー変位だ。電波でもドップラー変位は起きる。近づいてくる衛星からの電波は周波数が高くなるし、逆に遠ざかる時は低くなる。だから衛星からの電波の周波数を調べると、衛星の速度が分かる。
あるいは電波を使って地上局と衛星との距離を測定するということも行う。地上局から送った電波を、衛星がオウム返しに送り返すようにすると、電波を送った時刻と帰ってきた時刻の時間差から、その時の地上局と衛星との距離が分かる。複数回測定すると距離の変化率、つまり速度も算出できる。
このほか、地上と衛星を往復する電波の行きと帰りの位相差を使ったり、最近では衛星と地上との間をレーザー光線を往復させたり ─── さまざまな方法を使って地上局と衛星との距離、衛星の速度などを計測し、計算で衛星がどんな軌道を飛んでいるかを決定する。どのような計測方法を使い、計算方法を工夫しても誤差は必ず発生する。1980年代、地球を周回する衛星の軌道決定の誤差は数百mぐらいあった。
1970年代末から米国防総省は、GPS衛星の打ち上げと運用を開始していた。当時のGPSは、精度の低い民間用信号「C/Aコード」と、暗号をかけた軍用信号「Pコード」とに分かれていたが、C/Aコードでも精度数十m、Pコードなら原理的に精度10mという高精度の測定が可能だった。しかも、測位信号を衛星で受信するだけで、手早く測定を行うことができる。こうして、1980年代に入ると衛星の位置を衛星測位システムで測定し、軌道決定する試みが始まった。

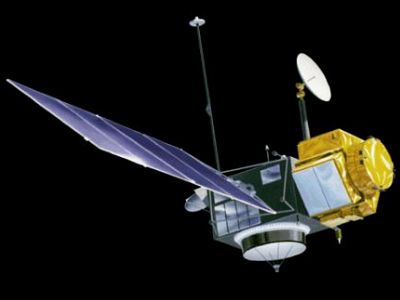
ランドサット4(提供:NASA)
世界で初めてGPS受信機を搭載した衛星は、米国航空宇宙局(NASA)の地球観測衛星ランドサット4(Landsat 4、1982年7月打ち上げ)だった。同衛星には、米国防総省が開発したGPS受信機GPSPAC(GPS receiver and processor Package)が搭載されていた。GPSPAC は、まず打ち上げ後3カ月かけて、GPSを使うことで衛星の軌道決定が可能かどうかの試験を行い、その後は1993年にランドサット4の運用が終了するまで、実際の軌道決定に使用された。
GPSPACは同型衛星のランドサット5にも搭載された。ランドサット5は1984年3月に打ち上げられ、2013年6月まで実に29年にもわたって運用され、地球を周回する衛星として今のところ、もっとも長寿命の衛星となった。
ランドサット4と5により、GPS利用の軌道決定手法を確立した米国防総省はその後、軍事衛星にもGPSPACを搭載して軌道決定を行うようになった。現在、GPSによる軌道決定技術は米デジタルグローブ社などの民間高分解能地球観測衛星にも使われるようになっている。
衛星測位を使って地球の形を計測する
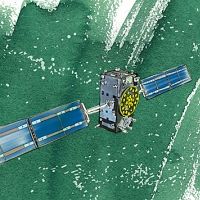
衛星測位システムを使うことで、より高精度の観測を可能にした衛星もある。フランスとアメリカが共同で開発した「TOPEX / Poseidon(ポセイドン)」(1992年8月打ち上げ)に始まる「地球の重力場の形を計測する衛星」だ。
TOPEX / Poseidon(提供:NASA)
地球は完全な球形ではなく少し赤道が膨らんだ形をしている。また内部も均一ではないので、場所によって重力が強いところや弱いところがある。水は低いところに流れる。つまり平均海水面はちょうど重力の強さが同じ面ということになる。陸地では仮想的に溝を掘って海水を導いたとして、地球全体を平均海水面で覆った面のことをジオイド面という(厳密には、平均海水面は海底地形や海水温度など影響を受けるので、重力の等しい面であるジオイド面とは2m程度ずれる)。
TOPEX / Poseidonは、2種類のレーダー高度計を搭載していた。衛星から電波を発射し、海面からの反射波を受信することで、衛星と海面との距離を測定する装置だ。衛星がぐるぐると地球をなめるようにして回り続ける間、測定し続ければ、海面の形状、つまりジオイド面の形を計測することができる。が、そのためには衛星が飛ぶ軌道を高精度で決定してやらねばならない。計測するのは衛星と海水面との距離だから、軌道決定の精度が低いと高精度にジオイド面の形を測定できなくなる。
そのためにTOPEX / Poseidonには、NASAがレーザー光を使った距離測定を行うための反射鏡を搭載し、フランスが同衛星専用のドップラー変位を使った地上の軌道観測網DORIS(Doppler Orbitography and Radiopositioning Integrated by Satellite)を開発した。加えてアメリカは、TOPEX / Poseidonに専用のGPS受信機「GPSDR(Global Positioning System Demonstration Receiver)」も搭載した。GPSDRでは通常の衛星測位だけではなく、継続的に測位を行って計算により誤差を減らしていく手法を使い、誤差10cm以下の位置測定を可能にした。

SFU(提供:JAXA)
日本で初めてGPS受信機を搭載したのは、1994年2月に打ち上げられた軌道突入実験機OREX(りゅうせい)。次いで1995年に打ち上げられた宇宙実験衛星SFU(Space Flyer Unit)にもGPS受信機を搭載し、GPSによる軌道決定の実験を行った。
1997年11月に打ち上げられた技術試験衛星VII型きく7号では、ランデブー・ドッキング時の衛星測位にGPSを使用する試験が行われた。同衛星はターゲット衛星おりひめ、チェイサー衛星ひこぼしの2衛星がドッキングした形態で打ち上げられ、軌道上で分離していったん離れた後で再度接近し、ドッキングするという試験を繰り返した。GPSは両衛星の距離が10km~600mにある時の両者の相対的な位置測定に使用する。600m~2mではランデブー・レーダーを、2m~0.3mでは画像センサーを使って相互の距離と姿勢を検知する仕組みである。きく7号で開発されたGPS利用のランデブー・ドッキング技術は、GPSを利用した宇宙機の自動軌道制御という意味でも世界初であり、その後、国際宇宙ステーション(ISS)へ貨物を輸送する無人輸送船こうのとり(HTV)の、ISSへのランデブー・ドッキングシステムへと発展した。
そのほかにも日本は、陸域観測技術衛星だいち(ALOS、2006年打ち上げ)、だいち2号(ALOS-2、2014年打ち上げ)などの地球観測衛星にGPS受信機を搭載して軌道決定に使っている。さまざまな誤差低減手法を併用することで、最高で10cm程度で衛星位置の計測が可能になっている。
ロケット打ち上げにも使える衛星測位
衛星測位システムは、衛星の軌道決定だけではなく、衛星を打ち上げるロケットの管制・誘導にも使える可能性がある。
ロケットは衛星を狙った軌道へ高精度に投入するため、自分が今どの場所をどの速度で飛んでいるかを監視して、必要に応じて噴射の方向を変えて飛ぶ方向を修正する。通常は、1)内部で加速度を計測してロケット速度や位置を計算で割り出す慣性誘導、2)地上からレーダーでロケットの飛行経路を計測する電波誘導 ─── という2つの手段を使う。
測位衛星システムで飛行中のロケットの位置を測定できるようになると原理的には、高精度のロケットの管制・誘導が、高価な慣性誘導装置や、電波誘導のための大がかりな地上設備などを使わずに可能になる。
とはいえロケットは、打ち上げから30分程度の短い時間の間に地上から宇宙、つまり射点状に置かれた静止状態から宇宙空間での軌道速度までと、位置や速度が大きく変化する。その途中のどの段階で搭載機器にトラブルが起きてもすぐに致命的事態となるという特徴を持っている。このため現状では、航法衛星システムを慣性誘導や電波誘導と組み合わせてより安全な打ち上げを行えるようにするという方向で開発が進んでいる。
2017年1月15日、JAXA(宇宙航空研究開発機構)は、約3kgの衛星を打ち上げる超小型ロケットSS-520 4号機を打ち上げた。打ち上げは残念ながら失敗に終わったが、同ロケットにはユニークな位置計測装置が搭載されていた。

SS-520 4号機の打ち上げ(提供:JAXA)
通常は飛行するロケットの位置を搭載機器が計測すると、そのデータは直接電波で地上に伝送される。が、SS-520 4号機の位置計測装置は衛星携帯電話網イリジウムを使って地上に位置情報を伝送する仕組みだったのである。イリジウムは、高度780kmの軌道で66機の衛星を運用して、世界中のどこでも携帯電話による通話を可能にするサービスだ。つまり、高度780km以下なら宇宙でも通話可能である。
SS-520 4号機には、GPS受信機が計測した飛行中のロケットの位置をイリジウムの電子メール機能を使って地上に送信する装置が搭載してあった。位置情報はあらかじめ指定した電話番号の携帯電話にロケットから衛星携帯電話網を介して直接届く。
電子メールの送受信には時間遅れがあるので、この位置情報を使ってロケットを地上から誘導制御することはできない。しかし、後からロケットがどのような軌道を飛行したかを確認するのには十分使える。携帯電話という手軽な装置で位置情報を取得できるので、現在世界的に開発が進んでいる超小型の衛星打ち上げ用ロケットでは、このような衛星測位システムの利用法が一般化するかもしれない。
関連情報
これまでの連載記事
※ヘッダおよび本文画像提供:米国航空宇宙局(NASA)/宇宙航空研究開発機構(JAXA)
-
 2020年04月20日
2020年04月20日「日々の座標値」とは何か?
-
 2019年02月25日
2019年02月25日4月7日(日本時間)に2度目の「GPS週数ロールオーバー」
-
 2018年04月28日
2018年04月28日1998年、世界に先駆けてGPS利用ランデブ・ドッキングを実証したきく7号
-
 2017年08月31日
2017年08月31日GPS衛星の世代について
-
 2017年06月13日
2017年06月13日アルマナックとエフェメリスは、測位衛星の“時刻表”
-
 2017年01月09日
2017年01月09日CDMA [前編] ── ノイズから信号を拾い上げる
-
 2017年03月26日
2017年03月26日CDMA [後編] ── 正確な距離を読み取る
-
 2016年12月31日
2016年12月31日ガリレオを4機まとめて打ち上げ可能な理由は?
-
 2016年09月30日
2016年09月30日「電離圏」を電波で測る
-
 2016年07月04日
2016年07月04日「マルチパス」── 何がいけないの?
-
 2016年05月13日
2016年05月13日「電子基準点」大解剖 [前編]
-
 2016年05月14日
2016年05月14日「電子基準点」大解剖 [後編]
-
 2015年10月10日
2015年10月10日航法の歴史(1)電波航法
-
 2015年11月08日
2015年11月08日航法の歴史(2)初期の測位衛星
-
 2015年11月17日
2015年11月17日航法の歴史(3)GPSの登場
-
 2015年12月08日
2015年12月08日航法の歴史(4)SAの廃止
-
 2016年01月27日
2016年01月27日航法の歴史(5)GLONASSの蹉跌
-
 2016年02月19日
2016年02月19日航法の歴史(6)民間に便利なシステムを目指すガリレオ
-
 2016年03月22日
2016年03月22日航法の歴史(7)宇宙強国を目指す中国の切り札“BeiDou”
-
 2016年04月25日
2016年04月25日航法の歴史(8)マルチGNSSの登場
-
 2016年06月28日
2016年06月28日航法の歴史(9)安全保障を前に押し出すインドの“IRNSS”
-
 2015年12月25日
2015年12月25日ジオイドとは何か? [前編]
-
 2016年02月09日
2016年02月09日ジオイドとは何か? [後編]
-
 2015年10月27日
2015年10月27日測位衛星の3種類の軌道
-
 2015年09月18日
2015年09月18日宝探しで理解する衛星測位(1)2次元(平面)の測位
-
 2015年09月23日
2015年09月23日宝探しで理解する衛星測位(2)3次元(空間)の測位
-
 2015年09月26日
2015年09月26日宝探しで理解する衛星測位(3)衛星3機での測位
-
 2015年09月29日
2015年09月29日宝探しで理解する衛星測位(4)距離に誤差がある場合の測位
