








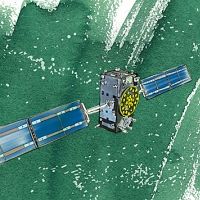
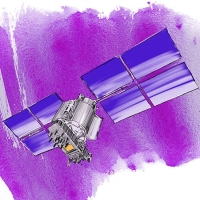
1998年、世界に先駆けてGPS利用ランデブ・ドッキングを実証したきく7号
日本の宇宙分野の実利用は、1969年に宇宙開発事業団(NASDA)が設立されたところから本格的に始まった。初期のNASDAの業務は、通信衛星、放送衛星、気象衛星の開発と、必要な技術の国産化だった。それぞれ、電電公社、日本放送協会、気象庁というユーザーが、必要としていたからである。が、それらを国産化するには、まず衛星という道具に共通の技術を確立しなくてはいけない。そこでNASDAは技術試験衛星(ETS=Engineering Test Satellite)という衛星シリーズを立ち上げた。このシリーズには「きく」という愛称が付いた。
NASDA初の衛星として打ち上げられたきく1号
きく1号(画像提供:JAXA)
最初の衛星、技術試験衛星I型きく1号(ETS-I)は、ロケットによる衛星打ち上げ、軌道投入、衛星の追跡と管制、運用技術を習得するための衛星で、1975年にNASDA初の衛星として打ち上げられた。
以後、きく2号(ETS-II、静止衛星の打ち上げ・運用技術の習得が目的、1977年打ち上げ)、きく3号(ETS-IV、N-IIロケット開発に伴う350kg級衛星の機能試験、1981年打ち上げ)、きく4号(ETS-III、3軸制御衛星技術の習得、1982年打ち上げ)と、技術開発を目的としてシリーズは続いた。なお、3号と4号でナンバーが逆転しているのは、4号(ETS-III)のほうが先に開発に着手したものの、技術的に難しく、打ち上げが遅れたためである。
1987年打ち上げのきく5号(ETS-V)で、日本は当時世界的に標準だった550kg級の静止衛星の技術を手に入れた。そして1994年打ち上げのきく6号(ETS-VI)では、やっと2トン級の大型静止衛星技術に手が届いたのである。ここまで、きく1号からきく6号までの技術試験衛星は、すべて「世界に互する実用的な静止衛星の技術を手に入れる」ことを目的としていた。
きく7号の目的はランデブ・ドッキング技術の修得

H-IIロケット6号機によるきく7号の打ち上げ(画像提供:JAXA)
しかし、1997年11月にH-IIロケット6号機で打ち上げられたきく7号(ETS-VII)は通信実験衛星ではなかった。それは、ロボット衛星だった。自律的な機能を持ち、宇宙空間で人間の身代わりとして働くこととを目的としていたのである。きく7号の開発目的は「将来の宇宙活動において必要なランデブ・ドッキング技術や宇宙用ロボット技術を修得する」というものだった。
衛星や宇宙機は通常、単独で目的の機能を発揮できるように設計する。が、一度にすべてを行えないことも多々ある。有人宇宙ステーションの運用はその最たるものだ。まず無人の宇宙ステーションを打ち上げ、軌道上で安全を確認してから、宇宙飛行士の乗る宇宙船を打ち上げ、同じ軌道に乗せて接近・ドッキングして宇宙飛行士が乗り移るという運用手順をとる。宇宙ステーションの乗組員交代や物資補給にも、ランデブ・ドッキング技術は必須だ。
また、宇宙用ロボット技術も将来的な人類の宇宙活動にとって不可欠な技術である。そもそも、衛星も深宇宙に出て行く探査機も、人がいないところで人の代わりの動作をするという意味ではロボットそのものだ。そこに、目(カメラ)など各種センサーを持たせ、腕(ロボットアーム)を持たせ、脳(自律判断機能を持つソフトウエアを搭載したコンピューター)を持たせて、状況に対応した動作が自律的に行えるようにすれば、危険であったりあまりにも遠かったりで人間が赴けない場所でも、安全に目的を達成することができる。

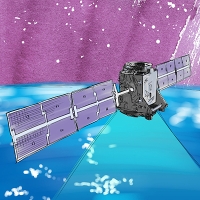
ランデブ・ドッキング実験のイメージ。右がおりひめ、左がひこぼし(画像提供:JAXA)
ランデブ・ドッキングのためには、2つの衛星の位置を正確に把握し続ける必要がある。正確な位置が分からなければ、接近することはできないし、ましてやドッキングすることなど不可能である。
正確な位置を知るためには、まず衛星が入っている正確な軌道を知る必要がある。そのためには衛星が発する電波を地上局で受信して、計算するという方法が使われる。このことを「軌道決定」という。また、ある程度2つの宇宙機が接近した後なら、搭載するレーダーや光学センサーを用いて、お互いの相対的な位置を計測することが可能になる。
ところで、現在有人宇宙活動に使われているのは、高度数百kmの地球低軌道と呼ばれる軌道だ。この軌道では、高度2万km前後の軌道に入っている測位衛星が送信する測位信号を使って位置を測定することができる。
測位衛星を使う利点は、短い計測時間でも自分の位置や速度を高い精度で知ることができるという点だ。これは約1時間半で地球を一周する速度で飛んでいる地球低軌道の衛星にとって大きな意味がある。接近する2機の衛星の位置把握が迅速にできれば、それはランデブ・ドッキングにおける安全性を向上させることにつながる。
GPSを使った衛星の位置測定を採用
前回「GPS衛星の世代について」で書いたように、米国のGPSを利用する衛星の位置計測は1980年代から始まっていた。技術的可能性は十分にある ── きく7号では、GPSを使った衛星の位置測定が採用された。
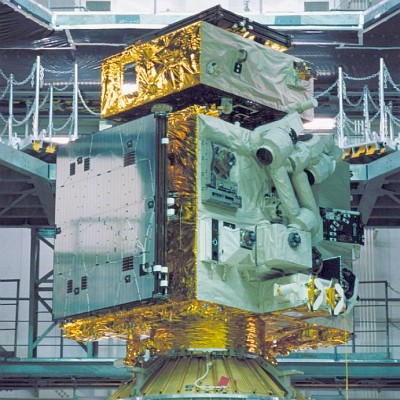
きく7号。おりひめ(上部)は、ひこぼし(下部)にドッキングした状態で打ち上げられる(画像提供:JAXA)
きく7号は、ターゲット衛星とチェイサ衛星の2機の衛星がドッキングした形状で打ち上げられる。
メインとなるチェイサ衛星「ひこぼし」は、本体の大きさが2.6m×2.3m×2.0mで重量は2540kg。2つの太陽電池パドルを拡げた全幅が19m。衛星の「上」に当たる面にロボットアームと、アームで行う各種実験のための装置を装備している。
ターゲット衛星「おりひめ」は0.7m×1.7m×1.5mの大きさがあり、打ち上げ時はひこぼしの側面にドッキングしている。本体から1つの太陽電池パドルを拡げた時の長さが7mあり、重量は410kgだ。打ち上げ後、軌道に到達してからおりひめとひこぼしを分離し、また接近させてドッキング、という形でランデブ・ドッキング実験を行う仕組みである。
おりひめとひこぼしのランデブ・ドッキングでは、1)両衛星の距離が10km~500mにある時の両者の相対的な位置測定にGPSを使用、2)500m~2mではランデブ・レーダーを使用、3)2m~0.3mでは画像センサーを使う ─── と3段階に分けて相互の位置を検出する。
きく7号が開発された時期、米国防総省はGPSの民間信号にSA(Selective Availability=選択利用性、精度劣化措置のこと)という運用ポリシーをかけており、精度は100mまでしか保障されていなかった。両衛星が500mの距離の時に誤差が最大100mというのは、少々誤差が大きすぎる。
そこできく7号は、GPS相対航法という測位手法を採用することになった。おりひめとひこぼしのランデブで重要なのは、「軌道のどの位置にいるか」という絶対位置ではなく、おりひめとひこぼしがそれぞれ相手から見てどの位置にいるかという相対位置だ。そこで、おりひめとひこぼしの両方にGPS受信機を搭載して、同じ測位衛星からの電波を受信して同時に測位を行い、その差をとってやる。すると、絶対的な測位の誤差が100mあったとしても、2衛星の相対的な位置はより高精度で測定できる。
2衛星の距離500mのところで、位置の計測はGPSからひこぼし搭載のランデブ・レーダーに切り替える。つまり、GPSに要求される精度は「距離500mで、誤差最大でもランデブ・レーダーの視野におりひめが入っていること」となる。ここから計算したGPSへの要求精度は「軌道面内が21m、軌道面外が16m、速度が面内5cm/秒、面外4cm/秒」となった。

りゅうせい(画像提供:JAXA)
実際のシステムでは、まずおりひめとひこぼしの両方に搭載されたGPS受信機で測位信号を受信し、おりひめからひこぼしへと、どの測位衛星の電波を測位に使ったかなどの情報を、衛星間通信で送る。するとひこぼしに搭載したコンピューターがおりひめの情報に従って同じ測位衛星の信号を使って測位を行い、相互の相対的な位置を計算する。
両衛星搭載のGPS受信機は、H-IIロケット初号機で1994年に打ち上げた軌道再突入実験機りゅうせい(OREX)のために開発したものに、受信チャンネル数を増やしつつ軽量化するなどの改良を加えた上で、GPS相対航法用の機能を追加して使用した。
1998年7月からランデブ・ドッキング実験を開始
きく7号ランデブ・ドッキング実験の分離時画像(FP-1)(画像提供:JAXA)
1997年11月にH-IIロケット6号機で打ち上げられたきく7号は、1998年7月からランデブ・ドッキング実験を開始した。1998年7月7日の第1回は画像センサーによるドッキング試験で、おりひめとひこぼしは分離後2mまで離れてからドッキングを実施した。

きく7号ランデブ・ドッキング実験の分離時画像(FP-2)(画像提供:JAXA)
第2回試験は画像センサーに加えてランデブ・レーダーを使った試験で、同年8月7日から始まった。分離後におりひめとひこぼしは520mまで離れてからドッキングを行う予定だった。しかしスラスターに異常が発生したため、いったん両衛星を12kmまで離して安全性を確保し、その間にスラスター運用法や搭載コンピューターのソフトの改修などを行い、8月27日、ドッキングに成功した。
この間におりひめとひこぼしはさまざまな方法で接近と分離を繰り返し、結果的に予定した以上の実験データを得ることに成功した。
第3回実験は10月26日から27日かけて実施した。分離したおりひめとひこぼしは、9km離れてから、おりひめに対してひこぼしが地球側から接近する方法でランデブし、ドッキングした。このランデブ方法は、当時開発中だった国際宇宙ステーション(ISS)への物資補給機こうのとりがISSへのランデブで使用する予定で、その実証実験として行ったものであった。
第2回と第3回のランデブ・ドッキング実験で、きく7号はGPS相対航法を使用した。同航法を使用したランデブは世界初であった。きく7号の得た技術的データはその後、こうのとりがISSにランデブ・ドッキングする手法へと応用された。
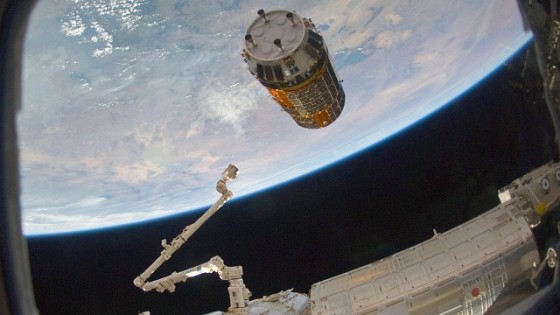
ISS下方30m地点でISSと相対停止するこうのとり2号機(画像提供:JAXA/NASA)
きく7号は1999年11月にすべての実験を終了した。その後は機器の状態をチェックするハウスキーピング運用を続けてきたが2002年10月30日に電波の送信を停止する停波コマンドを送り、運用を終了した。希薄な上層大気の空気抵抗により、徐々にきく7号が巡る軌道は低下し、2015年11月13日に大気圏に突入して消滅した。
本稿では衛星測位関連のトピックに記述を絞ったが、その他にもロボットアームによるさまざまな工学実験などで、きく7号は大きな成果を残した。日本が世界に誇ることができる、世界最先端を実現した技術試験衛星であった。
これまでの連載記事
※ヘッダは、きく7号のイメージ図(画像提供:JAXA)
-
 2020年04月20日
2020年04月20日「日々の座標値」とは何か?
-
 2019年02月25日
2019年02月25日4月7日(日本時間)に2度目の「GPS週数ロールオーバー」
-
 2017年08月31日
2017年08月31日GPS衛星の世代について
-
 2017年06月13日
2017年06月13日アルマナックとエフェメリスは、測位衛星の“時刻表”
-
 2017年06月10日
2017年06月10日宇宙でも使える衛星測位
-
 2017年01月09日
2017年01月09日CDMA [前編] ── ノイズから信号を拾い上げる
-
 2017年03月26日
2017年03月26日CDMA [後編] ── 正確な距離を読み取る
-
 2016年12月31日
2016年12月31日ガリレオを4機まとめて打ち上げ可能な理由は?
-
 2016年09月30日
2016年09月30日「電離圏」を電波で測る
-
 2016年07月04日
2016年07月04日「マルチパス」── 何がいけないの?
-
 2016年05月13日
2016年05月13日「電子基準点」大解剖 [前編]
-
 2016年05月14日
2016年05月14日「電子基準点」大解剖 [後編]
-
 2015年10月10日
2015年10月10日航法の歴史(1)電波航法
-
 2015年11月08日
2015年11月08日航法の歴史(2)初期の測位衛星
-
 2015年11月17日
2015年11月17日航法の歴史(3)GPSの登場
-
 2015年12月08日
2015年12月08日航法の歴史(4)SAの廃止
-
 2016年01月27日
2016年01月27日航法の歴史(5)GLONASSの蹉跌
-
 2016年02月19日
2016年02月19日航法の歴史(6)民間に便利なシステムを目指すガリレオ
-
 2016年03月22日
2016年03月22日航法の歴史(7)宇宙強国を目指す中国の切り札“BeiDou”
-
 2016年04月25日
2016年04月25日航法の歴史(8)マルチGNSSの登場
-
 2016年06月28日
2016年06月28日航法の歴史(9)安全保障を前に押し出すインドの“IRNSS”
-
 2015年12月25日
2015年12月25日ジオイドとは何か? [前編]
-
 2016年02月09日
2016年02月09日ジオイドとは何か? [後編]
-
 2015年10月27日
2015年10月27日測位衛星の3種類の軌道
-
 2015年09月18日
2015年09月18日宝探しで理解する衛星測位(1)2次元(平面)の測位
-
 2015年09月23日
2015年09月23日宝探しで理解する衛星測位(2)3次元(空間)の測位
-
 2015年09月26日
2015年09月26日宝探しで理解する衛星測位(3)衛星3機での測位
-
 2015年09月29日
2015年09月29日宝探しで理解する衛星測位(4)距離に誤差がある場合の測位
