








GPS衛星の世代について
巨大な社会インフラストラクチャーにも寿命がある。道路が痛めば舗装し直す必要があるし、橋も老朽化すれば架け替えねばならない。古くなった水道管や下水管は交換しなくてはならないし、ビルだって老朽化すれば建て替える。
衛星システムも同じだ。社会インフラなので、衛星の寿命が来る前に次を打ち上げてやらないと機能を維持できない。衛星測位システムのように、多数の衛星からなる衛星システムでも基本は同じだ。設計した寿命が尽きる前に、次の衛星を打ち上げる。

GPS衛星の軌道概念図
多数の衛星で構成されるシステムの場合、問題になるのは「新しい衛星の仕様」だ。技術は進歩するので、どんどん新たな仕様を取り入れていく必要がある。その一方で、システムを構成する多数の衛星を、打ち上げのたびに新しい技術を入れ込んだ新型で置き換えていくと開発コストがとんでもなく高くついてしまう。
そこで「衛星の世代」という考え方が出てくる。まとまった数の衛星を「一つの世代」としてひと括りにして、同じ仕様、同じ設計でまとめて製造して打ち上げ、前の世代の衛星の寿命が尽きるのに合わせて、新たな仕様、新たな技術を入れ込んだ「次の世代の衛星」を開発して打ち上げ、少しずつ置き換えていくのだ。米国の衛星測位システム「GPS(Global Positioning System)」を例に、衛星の“世代”を見てみよう。
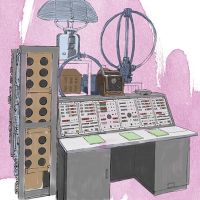
測位実験を行ったナブスター・ブロックI
GPS衛星ナブスター(NAVSTAR=NAVigation System using Time And Ranging)の各世代は、最初の世代がブロックI、次の世代がブロックIIというように「ブロック(Block=かたまり、区画という意味)」と呼ばれている。この呼び方は、アメリカでは一般的だ。改良しつつ、徐々に置き換えていく機械は世代別に「ブロック○(数字)」と区分することが多い。
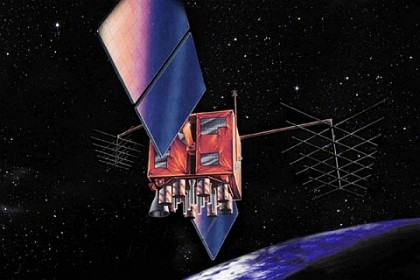
GPS衛星の第1世代「ナブスター・ブロックI」は1978~85年にかけて11機が打ち上げられて、10機が打ち上げに成功した。打ち上げ時重量は759kgで、設計寿命は5年だ。GPSが本当に機能するかどうかを確認する実験衛星であり、NDS(=Navigational Development Satellite、航法開発衛星)という別名も持っていた。測位信号はL1とL2という周波数帯で送信する。L1が民生用でL2は軍用だった。
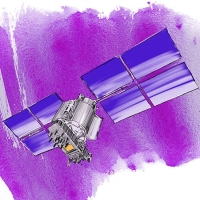
初代実用衛星ブロックII/II A
第2世代衛星「ナブスター・ブロックII」は、最初の実用衛星だ。重量1660kgと大きくなり、寿命も7.5年に延びた。1989~90年にかけて、9機が打ち上げられた。
ここで、ブロックIIには改良が加えられて「ブロックII A」となった。ブロックII衛星と基本設計は同じだが、衛星に自律動作機能が付加された。それまでのナブスター衛星は地上から監視し、必要に応じてコマンドを送信して操作する必要があった。それに対してブロックII A衛星は最大で180日間、地上からのコマンドなしで自動的に動作できる。衛星重量は、さらに増えて1815kgとなった。ブロックII A衛星は1990~97年に19機が打ち上げられ、ブロックIIとブロックII A衛星で実用システムとしてのGPSは完成した。

ナブスター・ブロックII/II A衛星(提供:米国政府)
衛星メーカーが交代したブロックII R
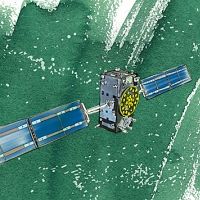
ブロックII Aの次の世代は、ブロックII BでもブロックIII...でもなく、「ブロックII R」衛星だ。Rは「Replenishment(補充)」という意味である。ここまでブロックIからブロックII Aまでの衛星は、ロックウェル・インターナショナル(Rockwell International)社が製造を担当してきた。対して、ブロックII RはGEアストロ(General Electric Astro Space)社が受注、後にGEアストロ社を買収したロッキード・マーチン(Lockheed Martin)社が製造を担当することになった。
同じブロックIIといいながら、ブロックII Rは、それまでのブロックII Aまでの衛星と比べると大きく進歩した設計となった。搭載電子系は一新されてブロックII Aよりも長期間の自律動作が可能になった。また、他のブロックII R衛星が発する電波を受信することで、自らの軌道を決定する機能も備わった。衛星重量は2030kgへと増加する一方で、衛星寿命は10年となった。
最初のブロックII R衛星は、1997年7月23日にフロリダ州のケープ・カナヴェラル(Cape Canaveral)空軍ステーションから打ち上げられたが、搭載した「デルタ(Delta)II」ロケットが打ち上げ直後に爆発し、燃える固体推進剤の破片を大量に地表へばらまくという、宇宙開発史上に残る大事故を起こした。もっとも、その後の打ち上げは順調で、2004年までに12機が無事軌道上で任務に就いた。
ナブスター・ブロックII R衛星(提供:米国政府)
米国防総省とロッキード・マーチン社の契約は21機の衛星を製造し、打ち上げるというものだった。1機打ち上げ失敗、12機打ち上げの後の、残る8機の衛星は、さらに次の世代の「ブロックII RM」衛星に改造された。Mは「Military(軍用)」を意味する。ブロックII RMは、妨害電波に強い軍用の「Mコード」という測位信号を送信する機能が追加されている。また、民間用のL2信号(L2C)が正式に追加されることとなった。2005~09年にかけて8機すべてが無事に打ち上げられ、運用に入った。

ナブスター・ブロックII RM衛星(提供:米国政府)
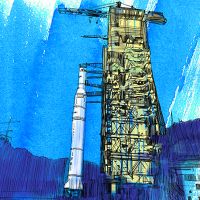
ロケットの世代交代に合わせて、衛星も次の世代へ
ブロックII RMの次は、ブロックIII...ではなく「ブロックII F」である。Fは「Follow on(後続、後継)」という意味だ。製造メーカーは前世代のロッキード・マーティン社から、ボーイング(Boeing)社に代わった。ブロックII Fは、打ち上げに使うロケットが「デルタ2」から新型の「デルタ4」「アトラス(Atlas)V」に切り替わるのに合わせて開発された。
ここまでブロックII系衛星を打ち上げてきた「デルタ2」ロケットは、ロケット側がGPS衛星を直接目的の軌道に投入することができなかった。このため、衛星側に「アポジ・モーター(Apogee Motor)」という固体推進剤のロケットを装備、ロケットでは最後一歩手前の軌道に入れて、最後に衛星がアポジ・モーターを噴射して目的の軌道に入るという打ち上げ方法をとっていた。これに対してデルタ4/アトラスVでは、ロケット側第2段が衛星を直接目的の軌道に送り届けることができる。このためアポジ・モーターが不要になる。
ブロックII Fはアポジ・モーターがなくなったために、打ち上げ時重量が1630kgまで軽くなり、その一方で衛星寿命は12年に延びた。また、これまでのL1とL2の周波数帯に加えてL5という周波数帯でもより高精度かつノイズに強い測位信号を送信するようになった。搭載する原子時計も高精度化され、従来よりも測位精度も向上した。ブロックII F衛星は2010~16年までに12機が打ち上げられた。

ナブスター・ブロックII F衛星(提供:米国政府)
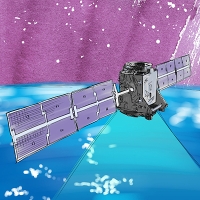
衛星大型化でより強力な測位信号を送信
ここでブロックII系統は終わり、次の世代は「ブロックIII」衛星となる。ナブスター・ブロックIIIの検討は1995年に始まった。これはブロックII A衛星の打ち上げで軌道上に24機の衛星がそろい、GPSの本格的な実用運用が始まった年である。開発開始は2008年。つまりブロックIIIは、ブロックIIまでの開発・実験・実運用の経験を生かし、一段と進歩した次の世代のGPS衛星として、長期間の検討・研究を経てから、開発に向けて動き出したわけである。担当メーカーは、ブロックII Fを担当したボーイング社ではなく、ブロックII Rを製造したロッキード・マーチン社となった。
当初、ブロックIII系衛星は、ブロックIII A、同B、同Cと、計画的に改良を加えていき、合計32機を製造する予定だった。しかし、開発に遅れが生じたために、より確実に開発を完了するための見直しを行い、現在はブロックIII Aに相当する衛星を10機調達して打ち上げるところまでが公式の計画として動いている。2018年から打ち上げが始まり、2022年までに10機を打ち上げる予定だ。
ブロックIII衛星は、衛星重量3680kgと一気に大型化した。これは、より強力な電波で測位信号を発信するためだ。測位信号がノイズに紛れにくくなるので、地上側は測位信号を受信しやすくなる。衛星寿命はさらに延びて15年だ。高精度の測位が可能で、かつこれまでのGPSの測位信号と欧州の衛星測位システム「ガリレオ(Galileo)」の両方に互換性を持つ新しい測位信号を送信する。また、有事対応のために、特定地域の上空でサービスを停止する機能も備えている。

ナブスター・ブロックIII衛星(提供:米国政府)
このように、GPSの衛星は、1970年代以降、徐々に世代交代して高機能化している。ロシアのGLONASSも1980年代以降、同様の衛星の世代交代で、高機能化と衛星の長寿命化を進めている。欧州のガリレオ、中国のBeiDou、インドのNAVIC(IRNSS)、そしてわが国のみちびきも、今後同様の衛星の世代交代によって、徐々に測位サービスを拡充していくことになるだろう。
関連情報
これまでの連載記事
※ヘッダ画像、および本文中に記載した画像は、米国政府提供
-
 2020年04月20日
2020年04月20日「日々の座標値」とは何か?
-
 2019年02月25日
2019年02月25日4月7日(日本時間)に2度目の「GPS週数ロールオーバー」
-
 2018年04月28日
2018年04月28日1998年、世界に先駆けてGPS利用ランデブ・ドッキングを実証したきく7号
-
 2017年06月13日
2017年06月13日アルマナックとエフェメリスは、測位衛星の“時刻表”
-
 2017年06月10日
2017年06月10日宇宙でも使える衛星測位
-
 2017年01月09日
2017年01月09日CDMA [前編] ── ノイズから信号を拾い上げる
-
 2017年03月26日
2017年03月26日CDMA [後編] ── 正確な距離を読み取る
-
 2016年12月31日
2016年12月31日ガリレオを4機まとめて打ち上げ可能な理由は?
-
 2016年09月30日
2016年09月30日「電離圏」を電波で測る
-
 2016年07月04日
2016年07月04日「マルチパス」── 何がいけないの?
-
 2016年05月13日
2016年05月13日「電子基準点」大解剖 [前編]
-
 2016年05月14日
2016年05月14日「電子基準点」大解剖 [後編]
-
 2015年10月10日
2015年10月10日航法の歴史(1)電波航法
-
 2015年11月08日
2015年11月08日航法の歴史(2)初期の測位衛星
-
 2015年11月17日
2015年11月17日航法の歴史(3)GPSの登場
-
 2015年12月08日
2015年12月08日航法の歴史(4)SAの廃止
-
 2016年01月27日
2016年01月27日航法の歴史(5)GLONASSの蹉跌
-
 2016年02月19日
2016年02月19日航法の歴史(6)民間に便利なシステムを目指すガリレオ
-
 2016年03月22日
2016年03月22日航法の歴史(7)宇宙強国を目指す中国の切り札“BeiDou”
-
 2016年04月25日
2016年04月25日航法の歴史(8)マルチGNSSの登場
-
 2016年06月28日
2016年06月28日航法の歴史(9)安全保障を前に押し出すインドの“IRNSS”
-
 2015年12月25日
2015年12月25日ジオイドとは何か? [前編]
-
 2016年02月09日
2016年02月09日ジオイドとは何か? [後編]
-
 2015年10月27日
2015年10月27日測位衛星の3種類の軌道
-
 2015年09月18日
2015年09月18日宝探しで理解する衛星測位(1)2次元(平面)の測位
-
 2015年09月23日
2015年09月23日宝探しで理解する衛星測位(2)3次元(空間)の測位
-
 2015年09月26日
2015年09月26日宝探しで理解する衛星測位(3)衛星3機での測位
-
 2015年09月29日
2015年09月29日宝探しで理解する衛星測位(4)距離に誤差がある場合の測位
