
-
Previous
Satellite Positioning, Navigation and Timing Service (PNT)

-
Next
Centimeter Level Augmentation Service (CLAS)

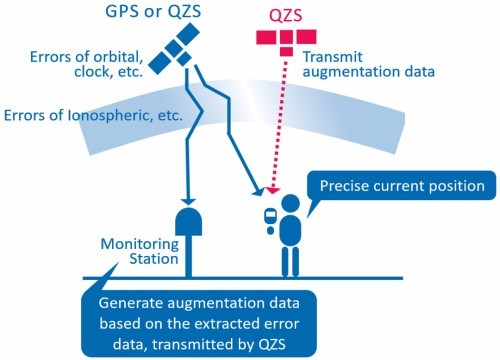
Sub-meter Level Augmentation Service (SLAS)
To reduce errors in satellite positioning, information that can be utilized to decrease these errors (sub-meter level augmentation information)—such as ionospheric delay, orbit errors and clock errors—is transmitted by Quasi-Zenith Satellites (QZS). Major satellite positioning errors include 1) errors caused by the small number of satellites and 2) ionospheric delay errors. Errors caused by the small number of satellites cannot be improved through sub-meter level augmentation information. Therefore, the ionospheric delay is the principal type of information that contributes to error reduction.
Ionospheric delay errors can be resolved by using dual-frequency receivers. However, these receivers are very large and expensive today, so it is hoped that existing single-frequency receivers can be improved and used for this purpose. L1S signals that transmit sub-meter level augmentation information are the same type of signal as the L1C/A positioning signals that are generally used, so they can be received on existing single-frequency receivers that have been modified.
It is generally said that single-frequency satellite positioning, such as GPS, involves errors of around 10 meters. Through sub-meter level augmentation, positioning becomes possible with an error of several meters. There are some time lags until the augmentation information is created and transmitted. Because alarms take time to issue the augmentation may be delayed, and positioning results may be negatively impacted.
In addition to QZS that transmit augmentation information, it is necessary for positioning satellites (GPS or QZS) that are the targets of augmentation to be visible. Accordingly, if fewer positioning satellites are visible between buildings or in other locations, the prescribed precision cannot be achieved in some cases.

This service is expected to be used mainly for purposes that are not heavily affected by time lags, such as pedestrians, bicycles, and ships. When utilizing this service on a vehicle, in addition to usage for driving assistance it will be possible to record accurate position information like when using a drive recorder. This service can be used on L1S-signal receivers. However, batteries are an issue when utilizing this service on mobile devices because it is necessary to constantly receive augmentation information, and it is expected that dedicated equipment will be used such as hand-held navigation devices.
For positioning functions on mobile phones, mobile phone base stations transmit original augmentation signals. For this reason, the usage of sub-meter level augmentation with mobile phones will be focused on situations outside of the mobile service range, such as in mountainous regions, on the ocean, or during times of disaster. Therefore, it is expected that this service will be introduced to devices with simple screens that do not consume a lot of batteries.
-

Overview of the Quasi-Zenith Satellite System (QZSS)
-

What is the Quasi-Zenith Satellite System (QZSS)?
-

QZSS is Becoming a Seven-satellite Constellation
-

Advantages of QZSS
-

Service Comparison
-

Transmission Signals
-
Satellite Positioning, Navigation and Timing Service (PNT)
-
Centimeter Level Augmentation Service (CLAS)
-

Multi-GNSS Advanced Orbit and Clock Augmentation - Precise Point Positioning (MADOCA-PPP)
-

Satellite Report for Disaster and Crisis Management (DC Report)
-

QZSS Safety Confirmation Service (Q-ANPI)
-
Positioning Technology Verification Service
-

Signal Authentication Service
-

Public Regulated Service
-

SBAS Transmission Service